
Research papers on photogrammetry
Explore our range of scientific publications
Discover scientific and techological developments in photogrammetry

BRIEF - Binary Robust Independent Elementary Features
Short description: We are introducing the BRIEF descriptor, which relies on a relatively small number of intensity difference tests to represent an image patch as a binary string.
Authors: M. Calonder, V. Lepetit, C. Strecha, P. Fua
First Public presentation: ECCV 2010, Heraklion
Read the research paper
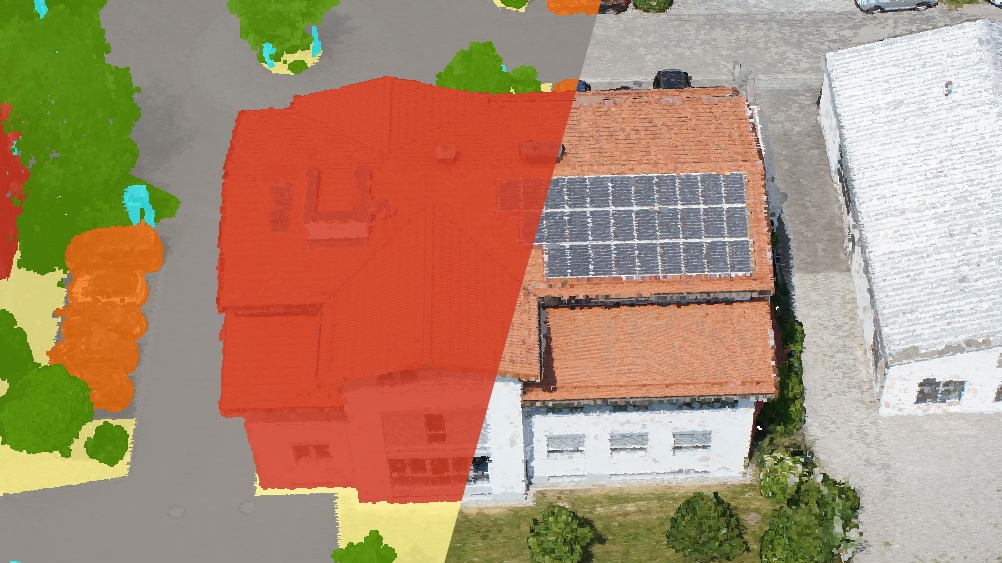
Classification of Aerial Photogrammetric 3D Point Clouds
Short description: We are presenting a powerful method to extract per-point semantic class labels from aerial photogrammetry data which lead to fast and accurate classification.
Authors: C. Becker, N. Häni, E. Rosinskaya,
E. d’Angelo, C. Strecha
First Public presentation: ISPRS 2017, Hannover
Read the research paper
Download the dataset
Photogrammetric Accuracy and Modeling of Rolling Shutter Cameras
Short description: We are evaluating the impact of the rolling shutter cameras of typical consumer UAVs on the accuracy of aerial mapping and 3D reconstruction, using real-world datasets.
Authors: J. Vautherin, S. Rutishauser, K. Schneider-Zapp, H. F. Choi, V. Chovancova, A. Glass, C. Strecha
First Public presentation: ISPRS 2016, Prague
Read the research paper
