

RTK vs PPK drones vs GCPs: o que tem melhores resultados?
Última atualização: 31 de janeiro de 2022
A precisão é de vital importância para os profissionais de mapeamento de aeronaves, fotogrametria e topografia aérea. Mas com tantos métodos por aí, nem sempre é claro qual é o melhor.
Testamos os drones RTK vs. drones não-RTK em diferentes condições reais para ajudá-lo a entender qual é a melhor ferramenta para você.
Qual é a diferença entre os zangões RTK e PPK?
A principal diferença entre os dois é quando as correções posicionais acontecem. RTK corrige durante o vôo, e PPK corrige depois.
Drones não-RTK - eles são precisos?
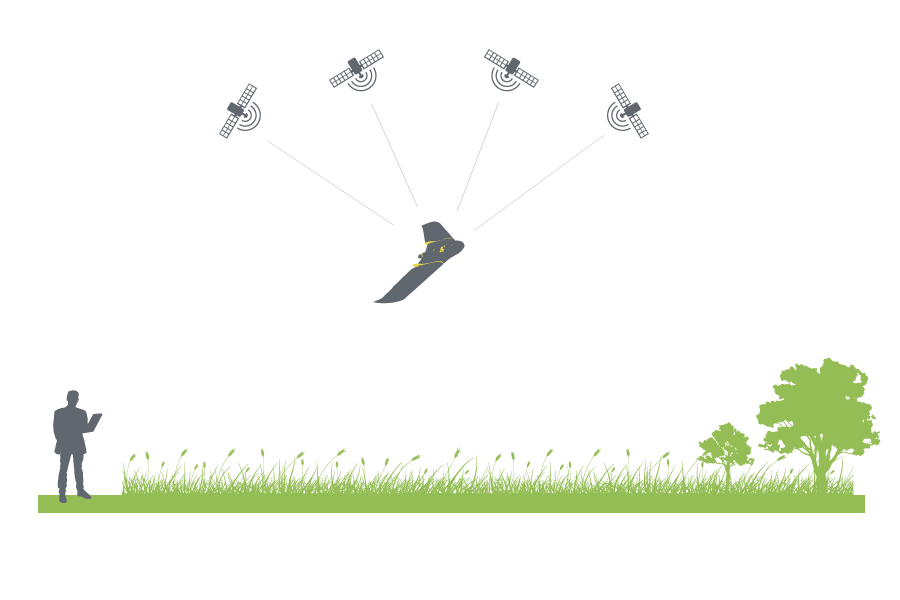
Quando você pilota um zangão non-RTK com um receptor GPS a bordo ou um receptor junto com a câmera, as posições da câmera são trilatadas a partir dos satélites, de modo que suas posições são identificadas por várias medidas de distância.
Normalmente, pode-se esperar uma imprecisão de até vários metros, especialmente nas direções Z, dependendo da qualidade do equipamento e da geometria do satélite.
O que é GNSS e o que é GPS?
Um Sistema Global de Navegação por Satélite (GNSS) é uma rede de satélites que transmite informações de tempo e órbita usadas para navegação e medidas de posicionamento. Um GNSS utiliza constelações de satélites e se baseia no conceito de trilateração. Em resumo, os receptores GNSS determinam com precisão sua própria localização através da medição da distância a três ou mais satélites.
Alguns exemplos de GNSS incluem Galileo GPS, GLONASS, e BeiDou.
O Global Positioning System (GPS) é um tipo de GNSS que foi desenvolvido pelo Departamento de Defesa dos EUA para uso militar nos anos 70, mas posteriormente foi tornado acessível também a civis. O GPS é hoje o GNSS mais utilizado no mundo, e fornece informações contínuas de posicionamento e cronometragem globalmente.
O que é tecnologia RTK e como ela funciona?
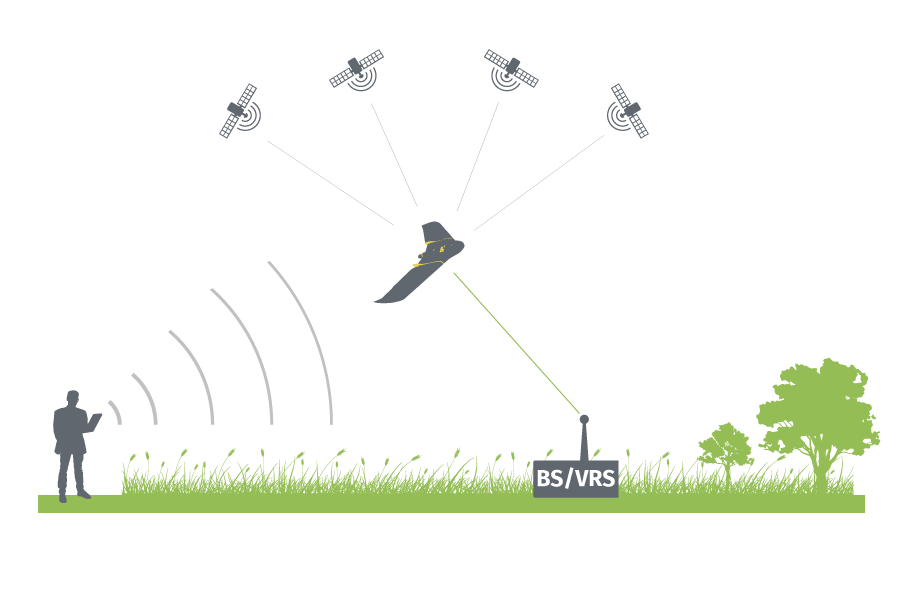
Um drone RTK transporta um receptor GNSS RTK a bordo que reúne dados de satélites, e uma estação base, para corrigir com mais precisão a localização da imagem em tempo real enquanto voa. Devido a estas conexões, o posicionamento RTK pode ter suas desvantagens, tais como interrupções de ligações de rádio e bloqueios de sinal. As longas distâncias entre o drone e a estação base podem causar obstrução dos sinais, resultando na perda de dados de correção e uma menor porcentagem de posições precisas da câmera no vôo.
Com uma conexão data-link, como GSM ou Wi-Fi, um drone RTK se conectará a uma estação base ou a uma estação de referência virtual (VRS) através do laptop ou dispositivo no controle do vôo. As posições das câmeras são calculadas em tempo real, referindo-se a referências terrestres, cujas localizações são medidas com precisão por um longo período de tempo. Os cálculos ajudam a corrigir as posições das c�âmeras até dois ou três centímetros de precisão, tanto horizontal como vertical.
Vantagens de RTK
- Não é necessário gastar tempo colocando GCPs em locais de difícil acesso
- Não há necessidade de pós-processamento do GNSS após o vôo
- As correções em tempo real são feitas usando o posicionamento GPS em tempo real do drone
- Melhor navegação de waypoint, útil para ambientes desafiadores
- Aterragem assistida autônoma com o RTK
- Nenhum pacote de software de pós-processamento é necessário para a operação em tempo real
No entanto, as coisas nem sempre funcionam perfeitamente. As pessoas que trabalham no local podem encontrar conexões interrompidas que interferem com as correções em tempo real para as posições das câmeras. O sistema oferece soluções de flutuação ou mesmo volta ao modo autônomo. As posições das câmeras são RTK-float, indicando incerteza em torno das correções. A exatidão será novamente desligada por dezenas de centímetros para RTK-float, ou mesmo metros de distância, como se obteria em vôos não-RTK. Neste caso, você pode realizar correções PPK, desde que seu fornecedor de aeronaves o faça. Por este motivo, seria benéfico utilizar GCPs.
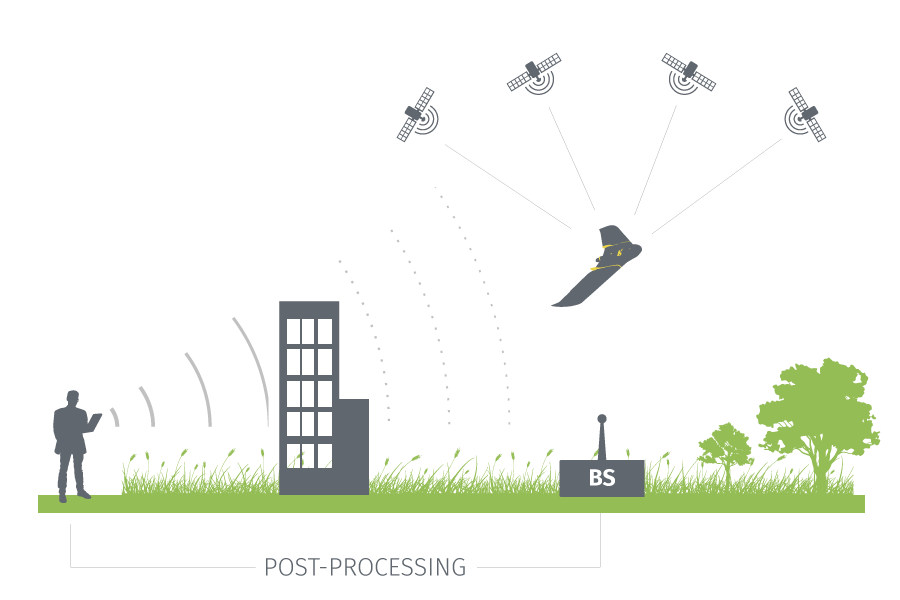
O que é um drone PPK e como funciona?
PPK significa "Post-Processing Kinematic" (Cinemático Pós-Processamento). Em um fluxo de trabalho PPK, o drone anexa geocoordenadas a cada imagem com base em um receptor GNSS a bordo. Também durante o vôo, uma unidade base (que poderia ser uma estação base GNSS, ou rede CORS) também registra informações posicionais com triangulação mais precisa.
Vantagens do PPK
- Não é necessário gastar tempo colocando GCPs em locais de difícil acesso
- Dados mais completos devido a não depender de uma conexão de dados constante
- Maior flexibilidade de vôo em ambientes onde podem ocorrer interrupções para a correção em tempo real
- Retenção de dados GNSS para comprovar a responsabilidade e reprocessamento, se necessário
- Economize tempo no local, pois não é necessário estabelecer uma conexão RTK
- Flexibilidade na utilização das estações de base
- Não há necessidade de rádio de longo alcance ou risco de abandono do datalink
- Posicionamento preciso do GNSS para o drone após o vôo
- Capacidade de processar somente com GPS ou GPS/IMU em suavização para frente e para trás
- Suporte ao processamento com GPS de antenas duplas
- Custo mais baixo, porque você não precisa de equipamento para medir GCPs e também economiza tempo por não precisar colocá-los
E os pontos de controle terrestres?
O que lhe proporciona uma melhor precisão? RTK, PPK, ou GCPs?
Há uma vantagem no uso de zangões RTK/PPK sobre os não-RTK se você não planeja aplicar nenhum ponto de controle terrestre(GCPs) devido a alguma limitação no local ou aos procedimentos dolorosos de medição.
Entretanto, um drone RTK/PPK precisa ser emparelhado com hardware e software específicos. Todo o sistema precisa suportar a comunicação com estações rádio-base ou VRS e inclui recursos de pós-processamento. Todas estas implementações de alta tecnologia tornam os zangões RTK/PPK muito mais caros do que outros. Também é crucial ter um software de processamento de imagem compatível, como o PIX4Dmapper, que leva em conta diferentes precisões das posições individuais das câmeras.
É claro, você pode adicionar RTK/PPK a um drone existente, que é uma escolha cada vez mais popular. Neste artigo fornecemos comparações de qualidade entre vôos RTK/PPK sem GCP usado e vôos não-RTK com GCPs bem distribuídos. O artigo pode servir como um pré-requisito ou uma referência para aqueles que estão decidindo se compram um novo drone ou se permanecem com GCPs.
Para melhor investigar o desempenho, fizemos dois vôos separados: um com modo RTK e outro com modo autônomo (correções em tempo real desabilitadas ou conexão perdida durante o vôo) sobre dois tipos diferentes de regiões: campos de cultivo e áreas urbanas.


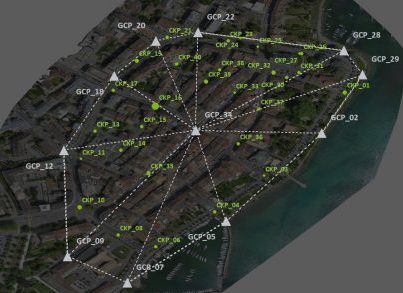
Os vôos foram realizados com um senseFly eBee Plus e GCPs medidos com Javad Triumph-ls. Tanto os vôos RTK como os vôos autônomos da mesma região seguiram as mesmas configurações. Usamos GCPs para ajustar as posições de câmera de vôos autônomos, e o mesmo conjunto de pontos de verificação para avaliar a precisão dos dois modos.
Todos os projetos foram processados com o PIX4Dmapper, usando o modelo padrão de mapa 3D.
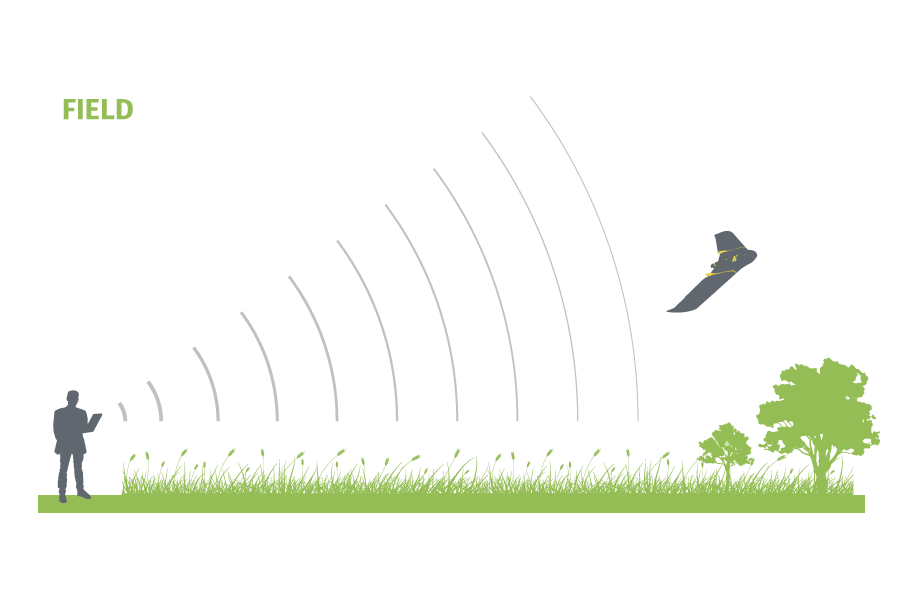
O primeiro teste: vôo de campo
grade única, altura = 102 m (GSD 2,5 cm), sobreposição 80%
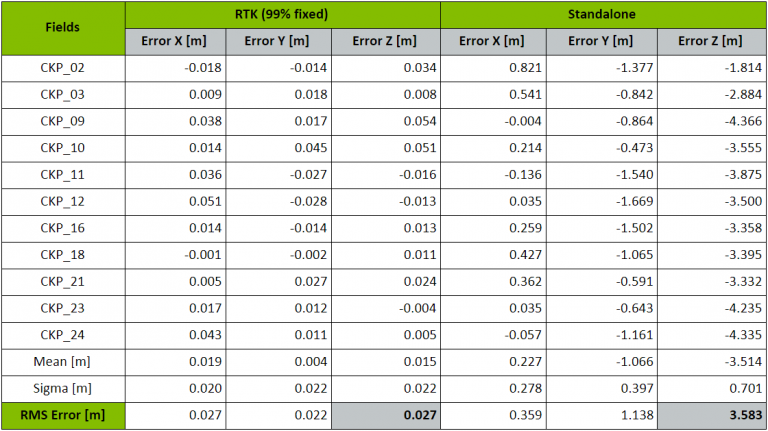
Ao sobrevoar um campo, podemos esperar que a conexão não enfrente muitos obstáculos. Nosso vôo RTK tem 99% das posições das câmeras fixadas tão claramente que não é necessário pós-processamento (PPK).
Aqui comparamos a precisão do vôo RTK sem usar nenhum GCP e o vôo em modo autônomo com GCPs bem distribuídos. O resultado do vôo RTK no campo é bastante impressionante.
Ele dá cerca de um pixel (2,5 cm) de precisão em todas as direções: X, Y e Z. No modo autônomo, obtemos 3,6 metros de precisão vertical, o que pode ser esperado sem aplicar correções de posição ou usar quaisquer GCPs.
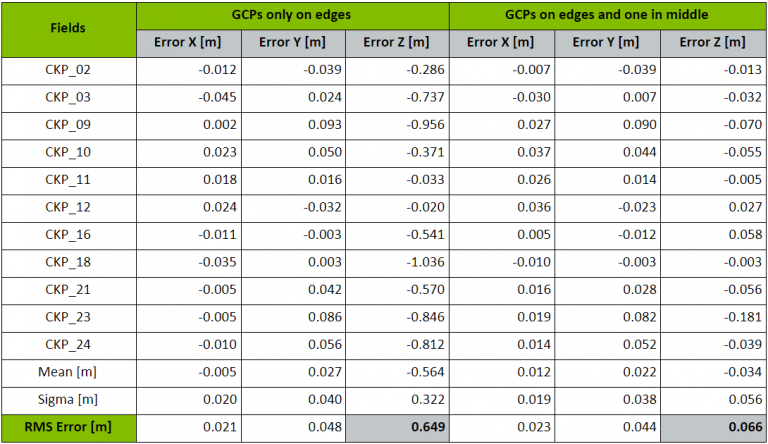
Uma vez que aplicamos um conjunto de GCPs, os erros em Z diminuíram muito. Entretanto, também descobrimos que a distribuição desempenha um papel extremamente importante neste tipo de projeto. Aqui também comparamos a precisão quando usamos GCPs em diferentes alocações:
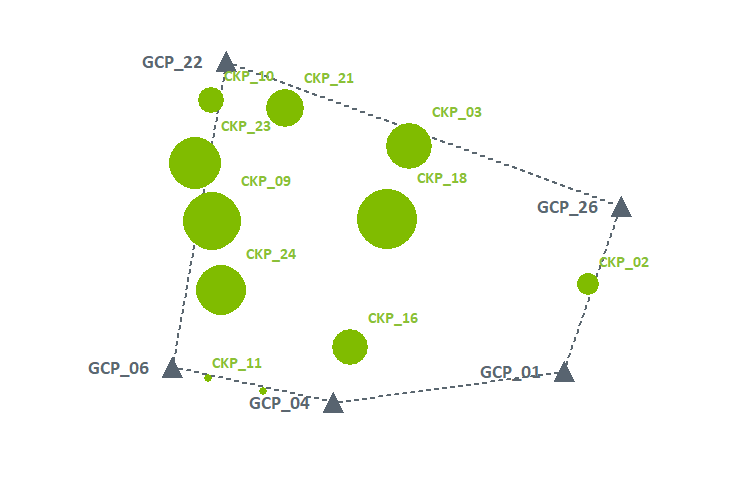
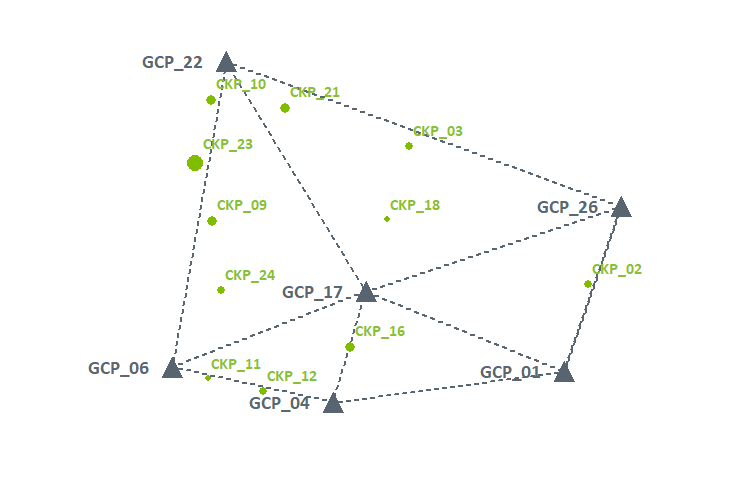
Pelo gráfico, pudemos ver que ao colocar um GCP adicional no meio do campo, a precisão vertical melhorou de 65 cm para cerca de 6,6 cm. O erro se acumula quando se afasta das GCPs e quando há terrenos variados ao redor que podem incluir obstruções - uma região difícil.
"Uma região difícil" aqui se refere a casos que podem ser problemáticos para encontrar características e combinar imagens, e campos de cultivo é um deles. As imagens retiradas de tais regiões geram mais erros de posicionamento que levam a uma menor precisão. Neste caso, as posições precisas da câmera (99% RTK-fixadas no primeiro estágio) funcionam como GCPs densos e bem distribuídos.
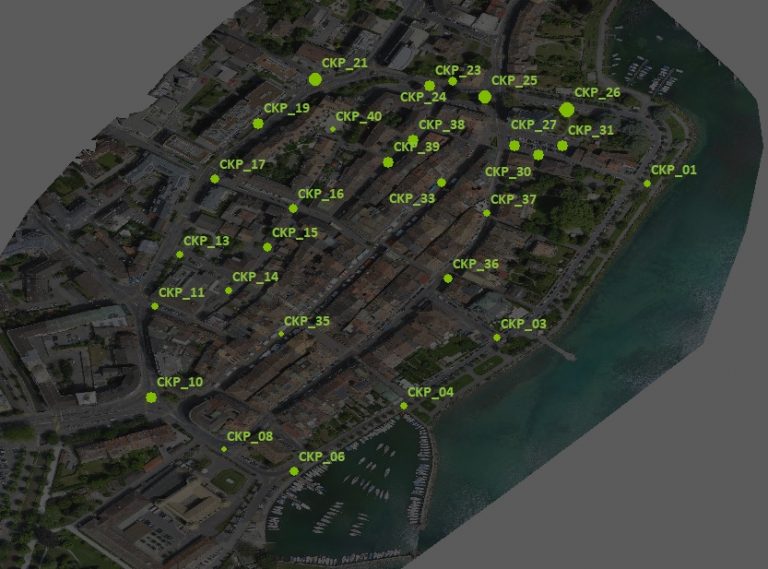
Vôo urbano
Grelha dupla, altura = 102 m (GSD 2,5 cm), sobreposição 80%
Voar um drone de asa fixa sobre uma área urbana pode ser mais complicado. Além das questões de permissão, você precisa de um local aberto para decolagem e pouso, o que nem sempre é viável para as regiões urbanas.

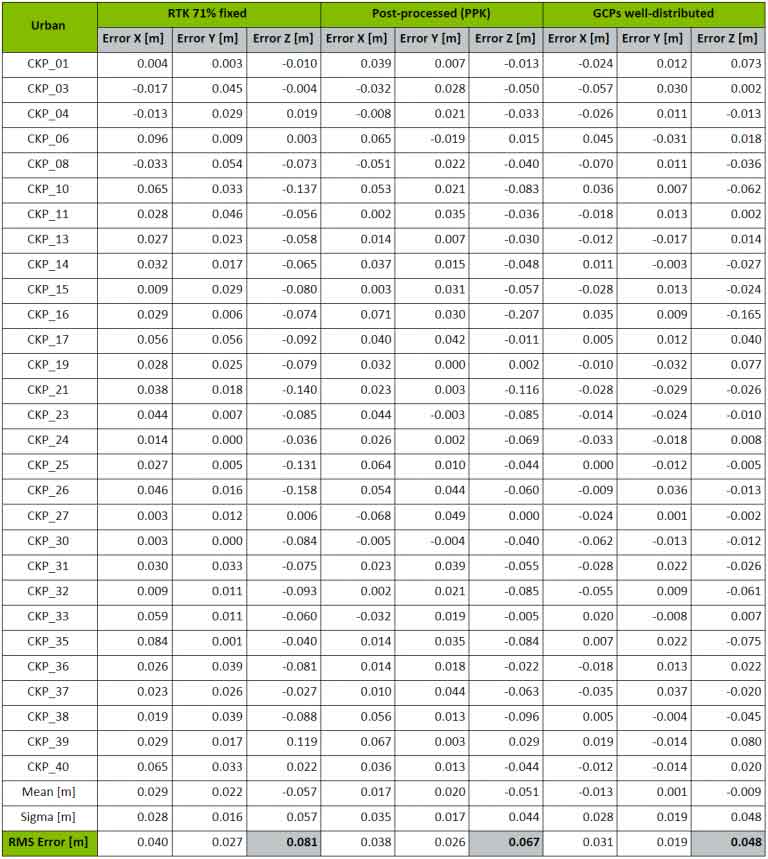
Neste projeto, encontramos um amplo parque esportivo próximo ao centro da cidade. Os edifícios, as árvores e o Wi-Fi local interferiram nas conexões de conexão de dados durante o vôo. Verificou-se que apenas 71% das posições das câmeras foram bem corrigidas (RTK-fixadas).
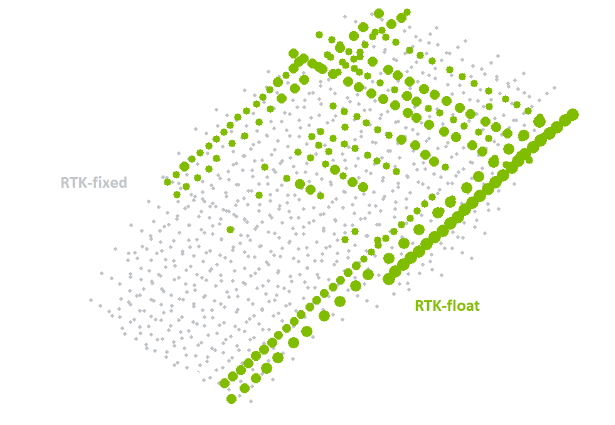
Em situações reais, a distribuição desigual do RTK-float (posições não bem corrigidas) causa uma barreira para melhorar a precisão global.
Pelos resultados, percebemos a desvantagem do vôo RTK quando a conexão foi perdida devido às obstruções. Nessas condições, o PPK melhora o resultado. Embora não seja garantido que seja sempre melhor do que usar GCPs, eles são bastante próximos em nosso caso de uso.
No vôo RTK, encontramos erros maiores perto de onde as posições da câmera RTK-flutuante estavam localizadas, enquanto que nos resultados pós-processados, os erros pareciam mais uniformes em toda a região.
Então quem ganha a partida PPK vs RTK vs GCPs?
Para campos ou lugares (planos ou com grande relevo) onde as conexões data-link são estáveis e livres de obstruções, o vôo RTK pode capturar o terreno muito bem e dá resultados extremamente precisos sem usando quaisquer GCPs.
O mapeamento com um drone RTK/PPK é especialmente vantajoso quando há uma vegetação densa, colheitas ou algumas características difíceis de combinar no conteúdo da imagem. Você sempre mantém a alta precisão e qualidade dos resultados em controle, independentemente do local onde você definir ou seja capaz de definir seus GCPs.
Além disso, o método PPK é ideal para vôos mais longos, especialmente missões BVLOS (Beyond Visual Line Of Sight).


Nas regiões urbanas, funciona de maneira diferente. Em certas partes você pode perder conexões, o que levará a uma distribuição desigual das posições da câmera RTK-flutuante, e isso dificulta a melhoria da precisão geral. Em nosso caso, o PPK proporcionou melhores resultados do que o vôo RTK. No entanto, nenhuma das duas proporciona melhor precisão do que a processada com GCPs bem distribuídas.
Agora vimos a qualidade da produção de ambas as soluções. Entretanto, há coisas que também precisamos ter em mente: a viabilidade, o tempo, o custo e o tipo de área que se deseja reconstruir.
Nem sempre é viável medir os GCPs devido a muitas razões no local, tais como texturas frágeis do terreno, pontos inacessíveis e outras preocupações de segurança pessoal. Além disso, o planejamento e a medição de GCPs podem levar horas cada vez, enquanto o pós-processamento normalmente leva apenas de 10 a 20 minutos. Quanto às despesas, a medição de GCPs é um custo que você deve arcar para cada área do projeto, ao contrário da taxa única de compra de um drone RTK/PPK.
Tenha em mente, no entanto, que você ainda está economizando muito tempo ao trabalhar com PPK e pontos de verificação, ao contrário de trabalhar com GCPs. Talvez você precise definir apenas 1 ponto de verificação em todo o canteiro de obras, em oposição a 5 a 8 GCPs, a fim de avaliar a precisão de seu projeto.
Considerando o acima exposto, é importante observar que os GCPs ainda fazem parte do mapeamento do drone, pois permitem que o drone de pesquisa produza um relatório de qualidade preciso e justifique a validade da solução. Há muitos fatores a serem considerados antes da compra de um drone RTK/PPK, mas a longo prazo parece ser um bom investimento, especialmente se você estiver trabalhando em uma indústria e precisar de resultados georreferenciados com muita precisão.
Se você estiver pronto para obter um drone RTK/PPK, não se esqueça de verificar se você tem acesso à estação base local ou à rede VRS se você for para a solução RTK/PPK. Caso contrário, você ainda precisaria medir suas próprias estações rádio-base!
Agradecimentos especiais
Especial agradecimento a todos os que doaram equipamento ou tempo
| senseFly | the ebee Plus drone |
| EPFL TOPO lab | o Javad Triumph RTK |
| Aquisição de dados | Dai Shi, Lisa Chen |


