RTK, LiDAR, & photogrammetry for smartphone triangulation
In surveying, triangulation is using the principles of geometry to find unknown points by measuring angles and distances from known locations. By applying some basic trigonometry, surveyors can accurately calculate the exact position of the new point. Triangulation is one of the most important concepts for surveying and is fundamental to photogrammetry.
The history of photogrammetry
The term 'photogrammetry' was first used in 1867 by German engineer and the founder of the field, Albrecht Meydenbauer, when he published an article on measuring a building's height using images. As technology advances, photogrammetry has become more accurate, efficient, and accessible, making it an increasingly important method for precision measurement.
Following in the footsteps of Albrecht Meydenbauer, we applied a similar approach using modern photogrammetric technology: an iPhone 15 Pro Max equipped with an Emlid Reach RX RTK antenna and PIX4Dcatch. The Strasbourg Cathedral held the title of the tallest building in the world for 227 years, from 1647 to 1874. How tall is it now? Let’s find out!
Triangulation in action: measuring the Strasbourg Cathedral
The Pix4D team set out to measure the height of the cathedral, capturing three different datasets with the iPhone, each from a different location around Strasbourg with visibility of the cathedral tower. These locations were:
- Place Kléber (see Fig. 2 with 676 images and LiDAR maps)
- Pont Sainte Madeleine (see Fig. 3 with 700 images and LiDAR maps)
- Ponts Couverts (see Fig. 4 with 570 images and LiDAR maps)
The team also collected a fourth dataset from right in front of the cathedral, in order to measure the base (see Fig. 5 with 636 images and LiDAR maps). By taking photos from multiple angles, we created the necessary “known points” that form the triangles used in triangulation.
All four models had RTK accuracy and were processed independently in PIX4Dmatic. The four projects were then merged inside PIX4Dmatic based on their image RTK locations. Ensuring an RTK fix means the positions of the image are precisely known—which is critical for forming the correct triangles.
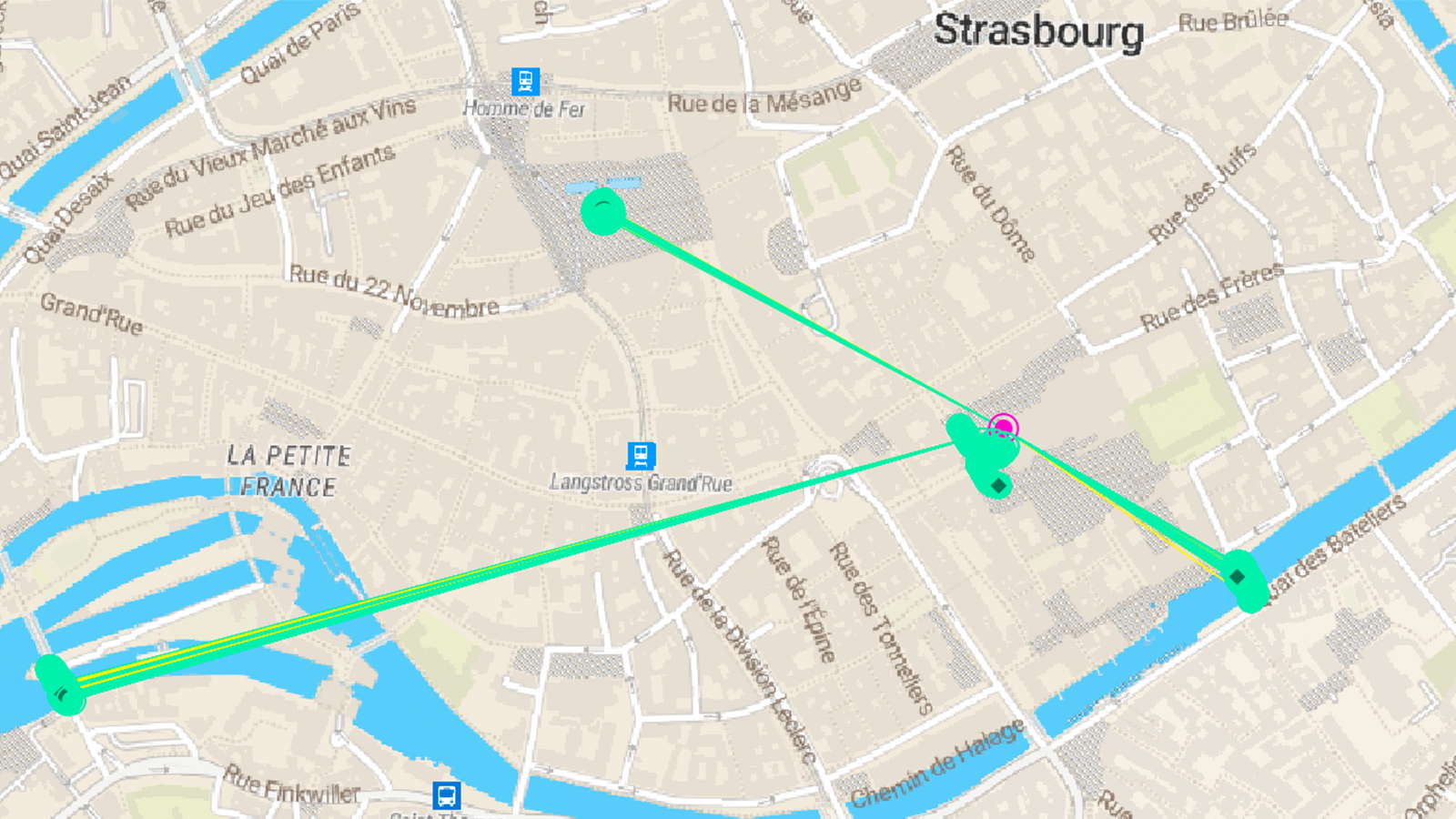
In the map below (Fig. 1) you can see all four locations:
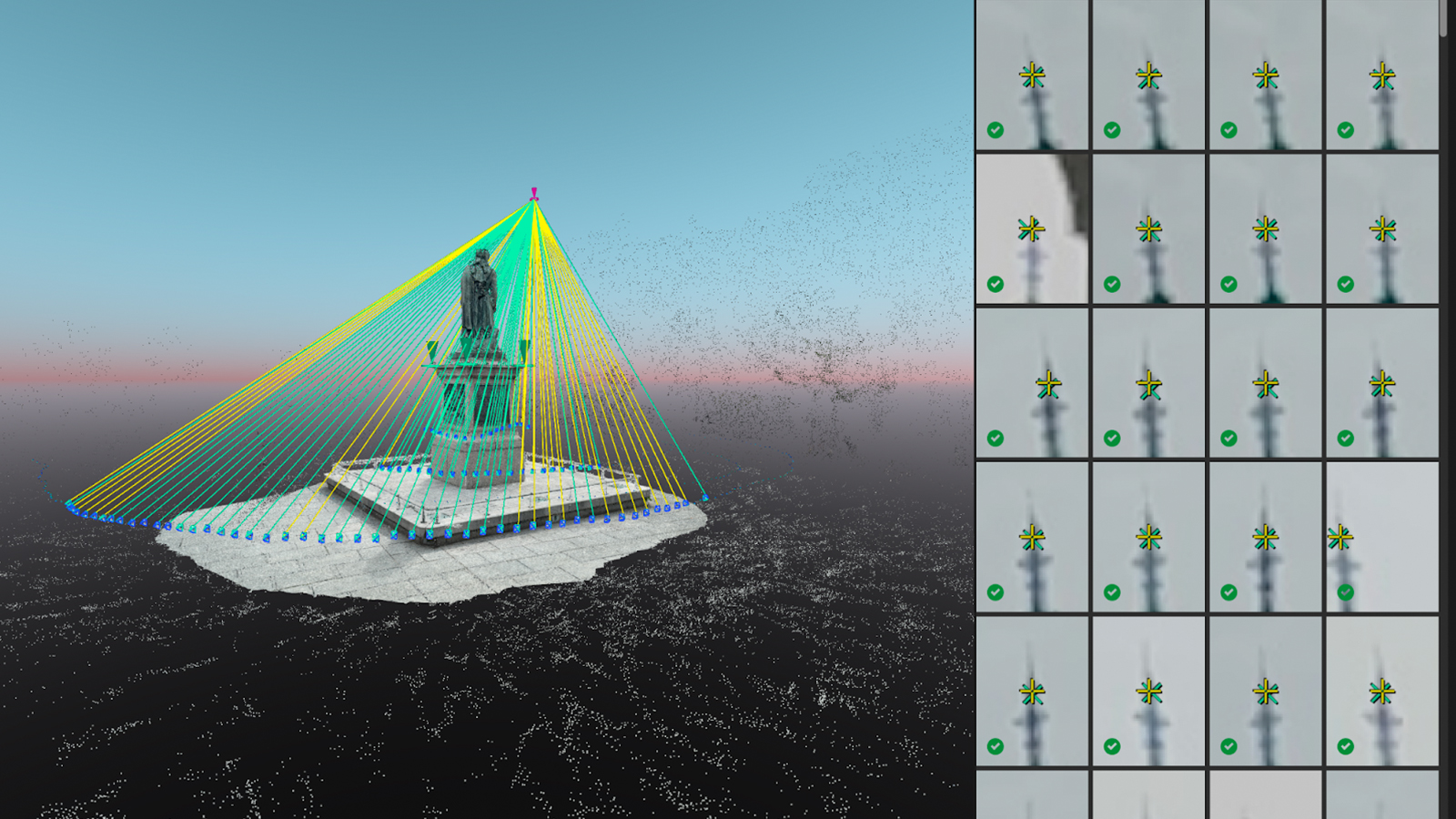
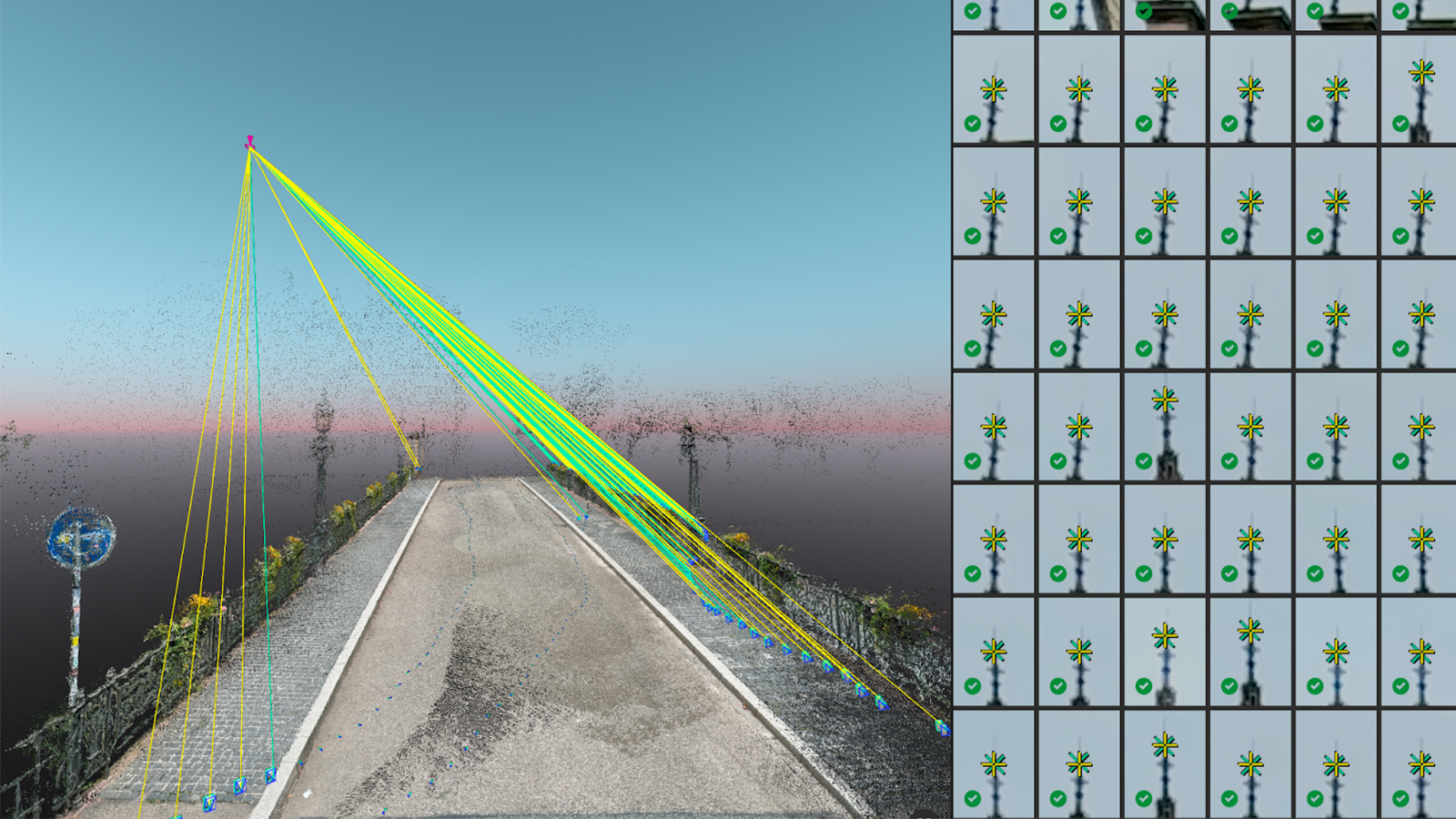
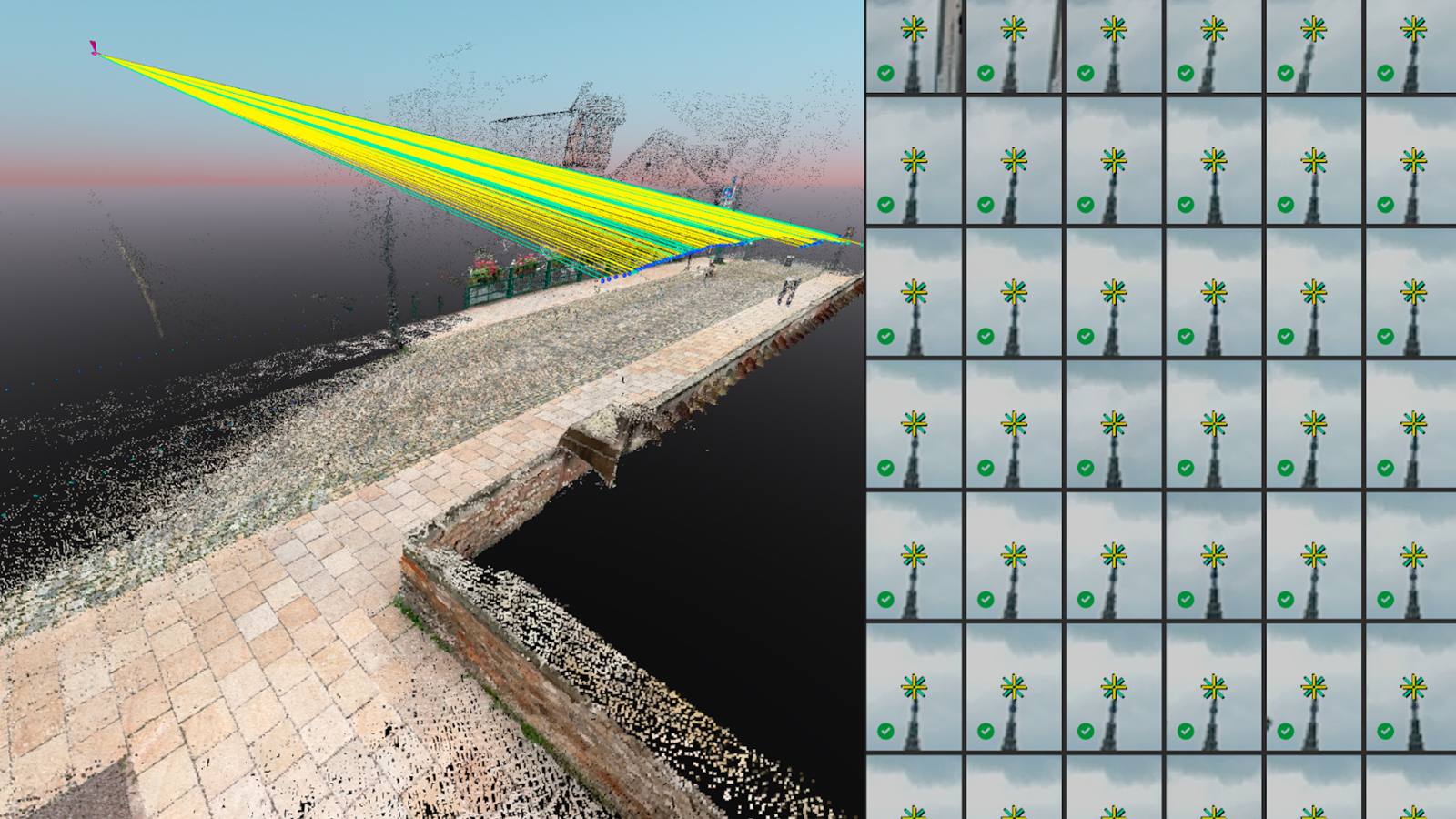
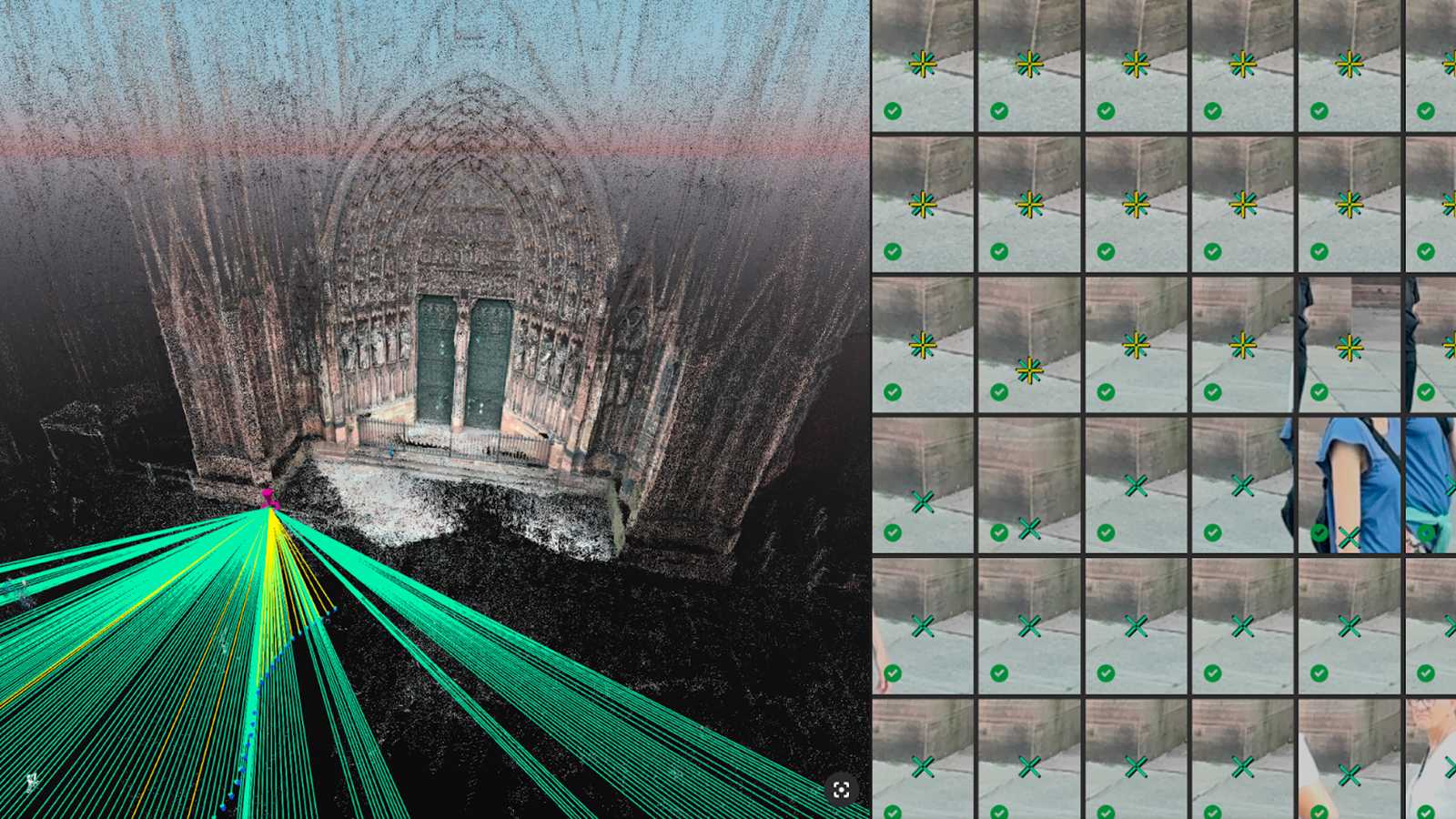
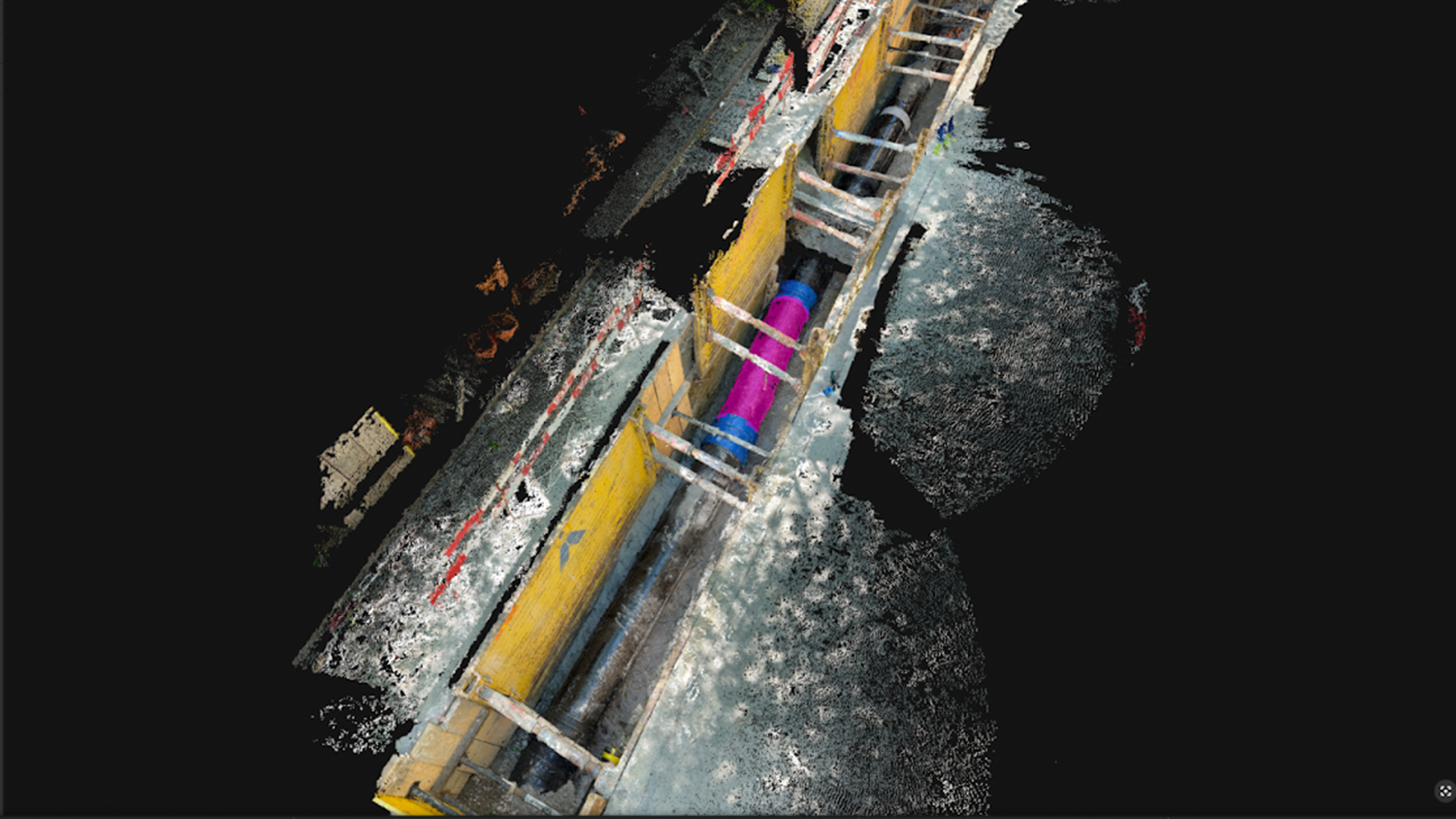
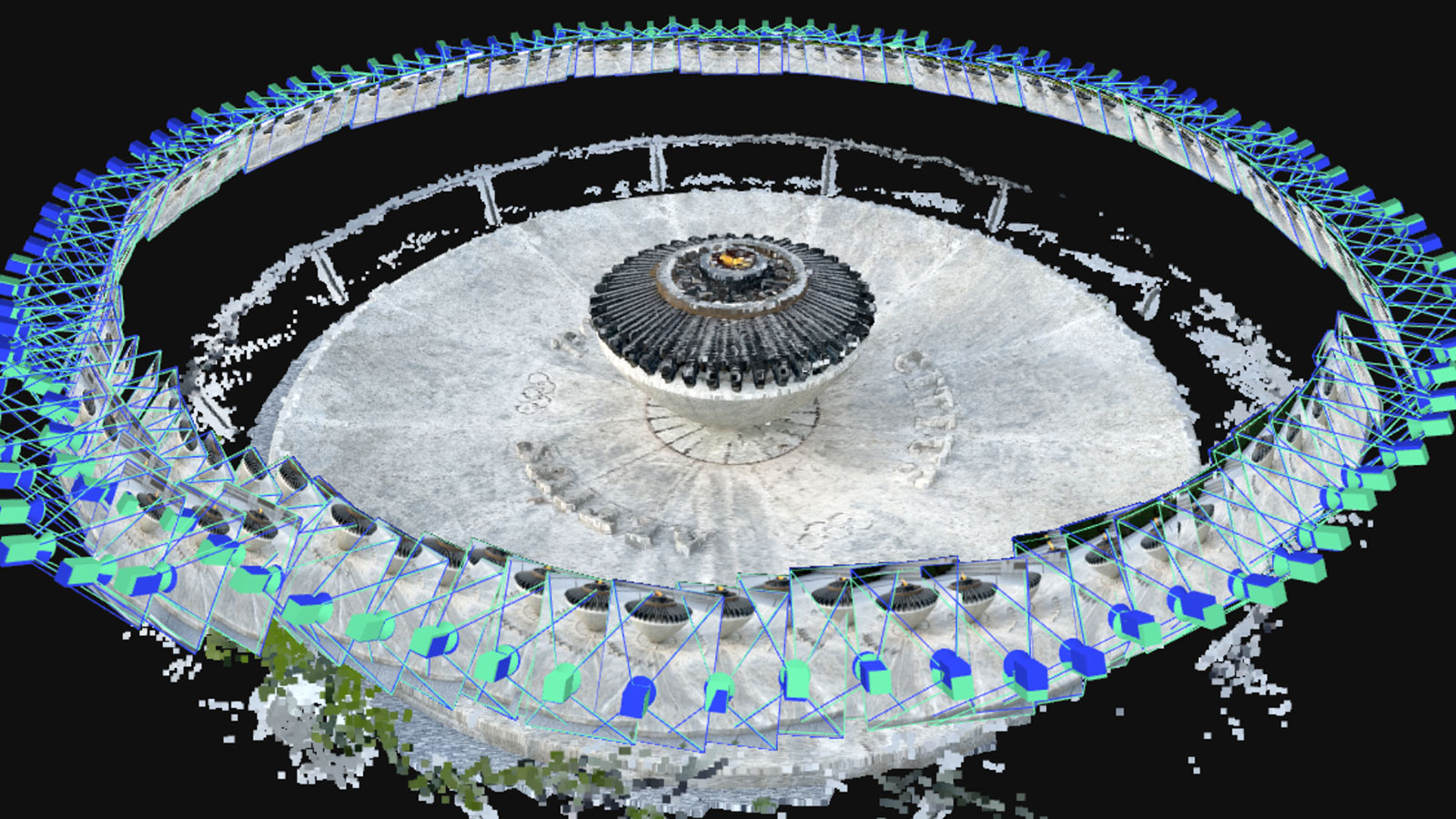
In the images above (Fig 2., Fig. 3., and Fig., 4) we can see the dense points, combining the iPhone LiDAR and photogrammetry points (left). The rays are linking to the top of the cathedral, which has been marked with a manual tie point (MTP) in the images (right). In Fig. 5 the base of the cathedral has been marked to create an MTP.
Creating MTPs (manual tie points) for the top and bottom of the cathedral involves marking the same points in multiple images taken from different angles. This approach minimizes triangulation errors by reducing the possible locations of the point. The more images from various viewpoints that mark the point, the more accurately its position can be determined.
The workflow
Data acquisition
Using PIX4Dcatch with the Emlid Reach RX GNSS rover attached, we connected to a GNSS antenna and NTRIP server and waited for RTK to fix
Then we started capturing images, ensuring the cathedral top was visible in some shots and that we had multiple datasets with different angles of the cathedral (see Fig. 1)
We exported all data to a ZIP file and transferred to a computer

Data processing
Next, we processed the data in PIX4Dmatic. PIX4Dmatic interprets the iPhone’s LiDAR information correctly and increases accuracy together with the photogrammetry processing
We processed each project individually and checked the quality of each one
Finally, we merged the first project to the second, third and fourth (see PIX4Dmatic support). Reoptimization was not needed after the merge, as each project was well georeferenced by the combination of photogrammetry, RTK, and LiDAR
Strasbourg Cathedral’s height revealed!
Once the four projects had been merged into one in PIX4Dmatic, we could use the different points of the cathedral in the final project to measure the height (and moreover its absolute positioning) through triangulation!
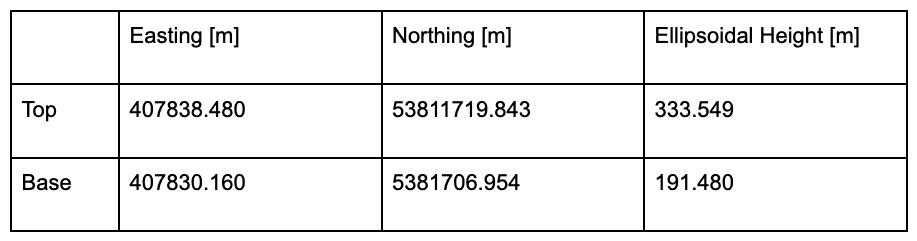
We created a manual tie point (MTP) for the top of the cathedral, making sure to mark the tie point in each of the three datasets that see the top from far away and from different angles. Next we created a manual tie point (MTP) for the bottom of the cathedral. In our case the bottom was only visible in the dataset of the cathedral itself. We then hovered over both points with a mouse and read out the coordinates. We used the default UTM coordinate system of this area and Ellipsoidal height.
The table below shows the readout of both points
Using the underlying principle of triangulation in both the data acquisition and processing phases, Pix4D’s photogrammetry software managed to accurately measure the height of the cathedral!
The height of the cathedral is 142.068m (the difference of the Ellipsoidal Height of top and bottom. We managed to estimate not only the height of the cathedral, but also its precise absolute position within a coordinate system, which was for Albrecht Meydenbauer in 1867 impossible to compute.
Got questions, or want to get involved? Join the conversation on LinkedIn and follow our hashtag #Pix4DLabs