RTK/PPKドローンはGCPよりも高い精度が得られるか?
ドローンマッピングや写真測量に携わるプロにとって、精度は生命線です。しかし、さまざまなドローン製品が市場に出回っている現在、どの製品を選ぶべきなのか迷われる方も多いでしょう。
そこで今回は、皆さんが最適な製品を選ぶ際に役立つ情報を提供するために、各種の測量現場においてRTKドローンと非RTKドローンの比較テストを実施しました。
RTKドローン vs 非RTKドローン
非RTKドローン - 精度に問題?
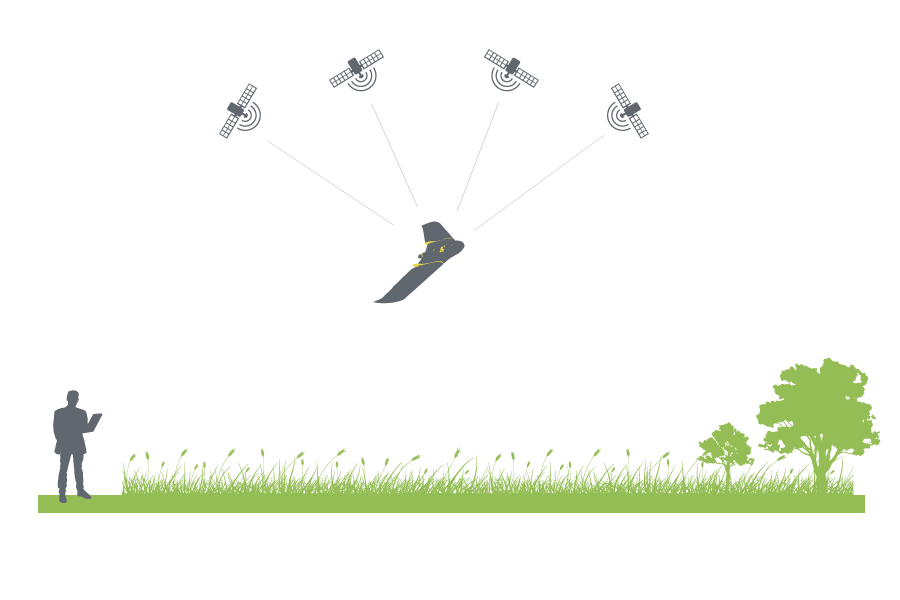
非RTKドローン に内蔵されたGPS受信機や、カメラに内蔵されたGPS受信機を利用して空撮を行う場合、カメラの位置は、複数の衛星からの距離を三角測量により測定することで導き出されます。
機器の性能や衛星の位置にもよりますが、特にZ軸方向で数メートル程度の誤差が生じるのが一般的です。
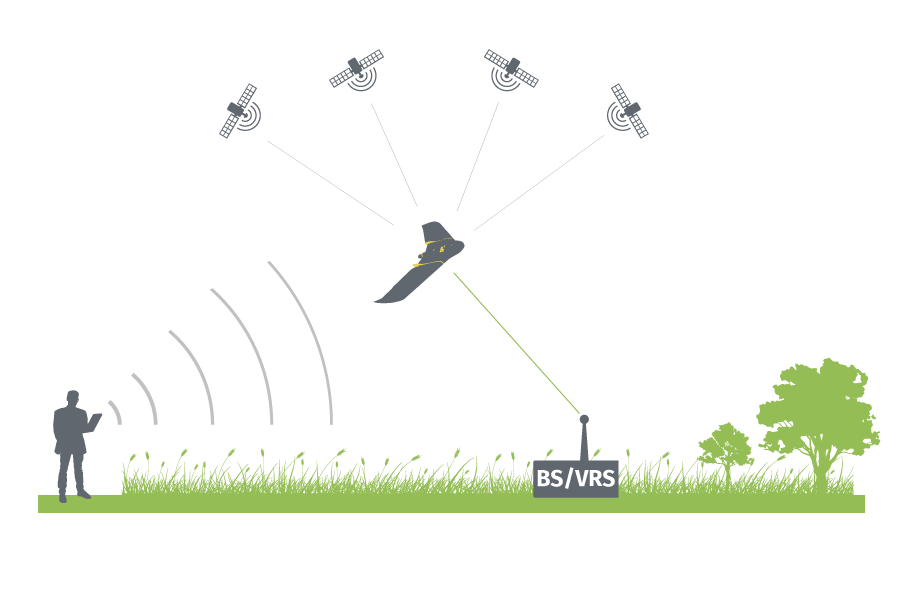
RTKドローン - リンクが必須
RTK ドローンの場合、ドローンがGSMやWi-Fiなどのデータリンクによってフライト制御用ラップトップと接続され、そこを経由して基地局または仮想基準点(VRS)に接続されます。カメラの位置は、地上の基準局からの信号に基づいてリアルタイムで算出されます。基準局の位置は、長時間の測定を実施することで正確に測定されます。この方法により、カメラの水平位置と高度情報を修正することで、誤差を2~3 cmまでに縮小できます。
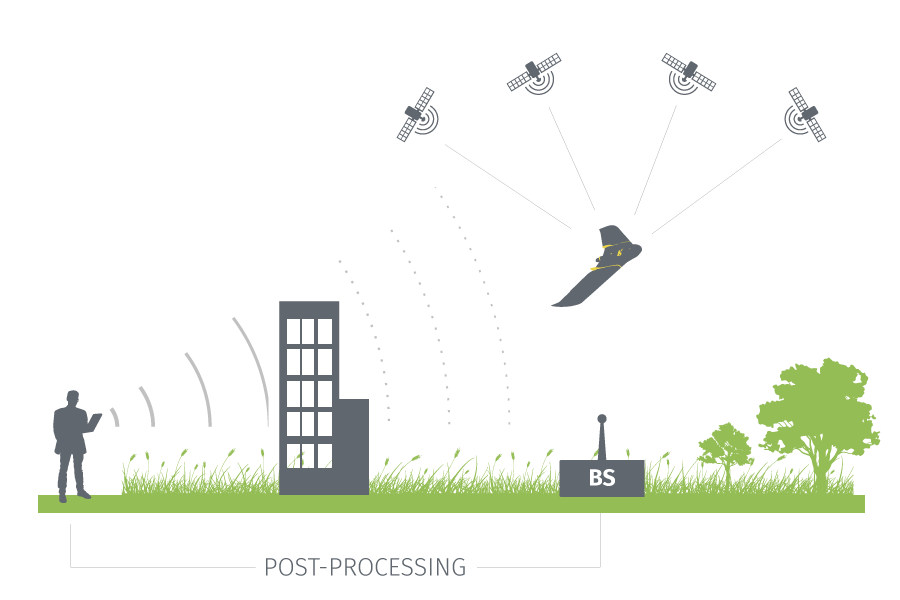
しかし、問題が生じることもあります。現場で接続障害が発生すると、カメラの位置をリアルタイムに補正できなくなります。その場合、システムからFloat解が返されるか、ドローンがスタンドアロンモードに移行してしまいます。カメラの位置がRTK-Float解になると、補正の信頼�性は大きく損なわれます。RTK-Float解の場合、精度が数十センチ台、あるいは数メートル台にまで低下し、非RTKドローンと同等の結果しか得られなくなります。このようなケースでは、後から__PPK__ドローンで、地上の基準点に基づいて計算を実施することもできます。
グラウンドコントロールポイント(GCP)について
RTK、PPK、GCPのうち、最も精度の向上に効果があるのはどれでしょうか。
現場に制約がある、手間がかかりすぎるなどの理由で、 グラウンドコントロールポイント(GCP)を一切設置しない場合には、非RTKドローンよりもRTKドローンやPPKドローンを使用する方が精度を確保できます。
しかし、RTKドローンやPPKドローンを使用するには��、特定のハードウェアやソフトウェアが必須となります。システムとして基地局またはVRSとの通信をサポートし、後処理機能にも対応する必要があります。さらに、Pix4Dmapperのような、各カメラ位置の精度の違いを反映できる画像処理ソフトウェアも欠かせません。
こうした最先端の機材やソフトウェアが、RTKドローンやPPKドローンには必須であるため、他の手法と比べるとコストがかかります。もちろん、既存のドローンにRTKやPPKの機能を追加することも可能で、実際によく行われるようになっています。次に、GCPを使用せずにRTKドローンまたはPPKドローンをフライトさせた結果と、GCPを適切に配置して非RTKドローンをフライトさせた結果を比較して、精度の違いを見てみます。新しいドローンを購入するか、引き続きGCPを使用するか迷っている方にとっては、本記事が大いに参考となるでしょう。
パフォーマンスを公平に調べるために、農地と市街地という2種類の地域において、RTKモードでのフライトと、スタンドアロンモード(リアルタイム補正を無効化、またはフライト中にリンクを切断)でのフライトを実施しました。


フライトにはsenseFly のeBee Plusを使用し、GCPの測位にはJavad社のTriumph-lsを使用しました。RTKモードでのフライトとスタンドアロンモードでのフライトは、どちらも同じ地域内では同じ構成で行っています。スタンドアロンモードのフライトではGCPを使用してカメラ位置を補正し、同じチェックポイント群に��よって両モードの精度を評価しました。
プロジェクトはすべてPix4Dmapperで処理され、デフォルトの3Dマップテンプレートを使用しています。
テスト1:農地でのフライト
シングルグリッド、高度102 m(GSD 2.5 cm)、オーバーラップ80%
農地のフライトでは、障害物によって接続が遮られる状態はあまり発生しないと考えられます。RTKモードのフライトではカメラ位置の99%でFix解が得られたため、後処理(PPK)が不要でした。
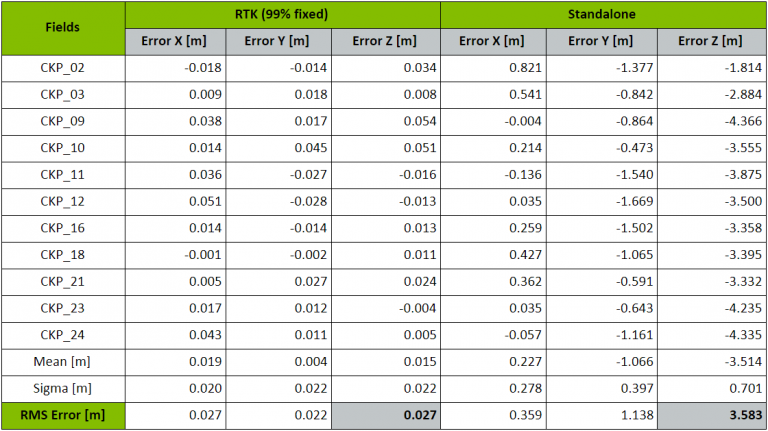
次の表で、GCP不使用のRTKモードでの精度と、適切に配置されたGCPを使用したスタンドアロンモードでの精度を比較してみましょう。農地において、RTKモードのフライトで得られた精度は極めて高いものでした。
その誤差は、X軸、Y軸、Z軸の全方向で1ピクセル(2.5 cm)程度です。一方、スタンドアロンモードでは垂直方向の誤差が3.6 mと、位置補正やGCPを用いなかった場合と同程度の結果になりました。
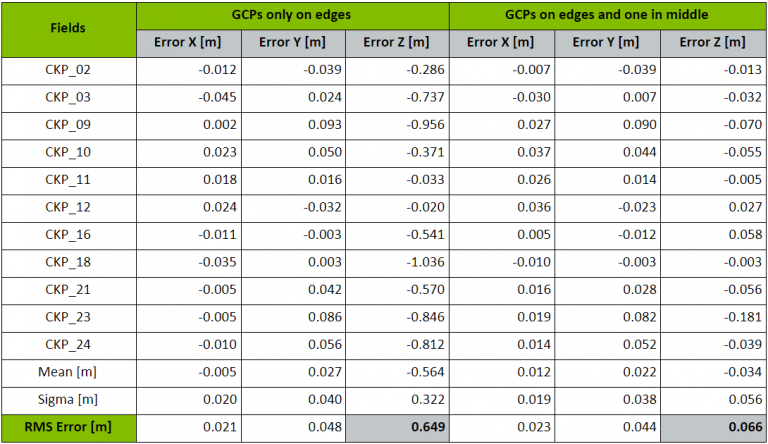
一連のGCPを設置したところ、Z軸方向の誤差が大きく減少しました。さらに、この種のプロジェクトではGCPの配置状況が精度に大きく影響することもわかりました。そこで、GCPの配置方法を変えた場合の精度 についても比較しました:
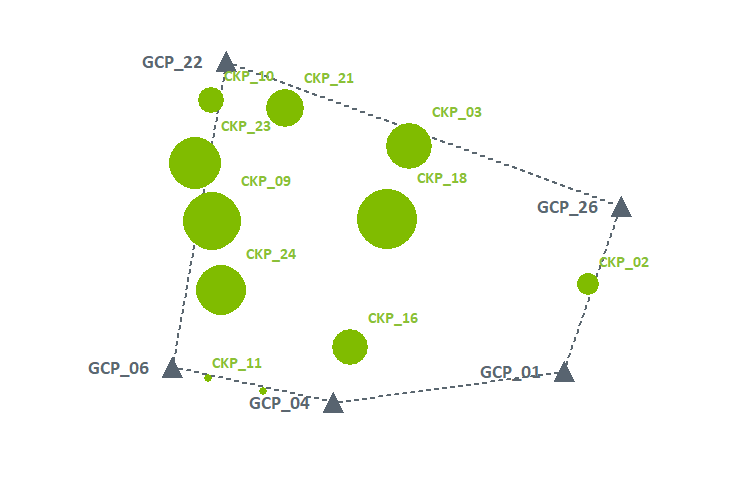
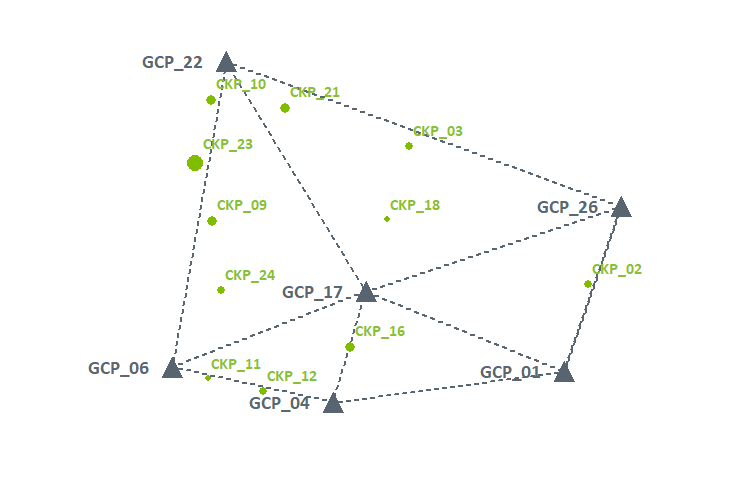
次の表からわかるように、フィールドの中央にGCPを1つ追加するだけで、65 cmあった垂直誤差が約6.6 cmに改善されていま�す。GCPから遠い場所や、照合が困難な領域に囲まれた場所では、このような誤差が大きくなります。
「照合が困難な領域」とは、特徴点の探索や画像マッチングが難しい領域のことで、農地もそれに該当します。こうした領域を撮影した画像では位置誤差が大きくなり、結果として精度が低下していまいます。そのようなケースでも、カメラ位置を正確に特定できれば(最初の段階でRTK-Fix解が99%)、GCPを適切な密度で配置した場合と同等の精度を確保できます。
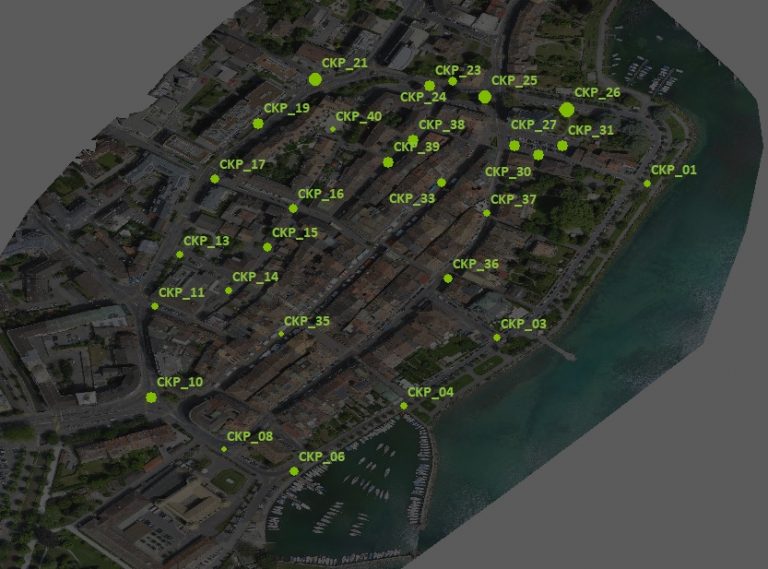
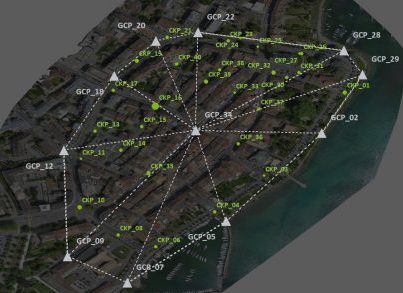
市街地でのフライト
ダブルグリッド、高度102 m(GSD 2.5 cm)、オーバーラップ80%
市街地では、固定翼ドローンを飛行させることは非常に困難です。飛行許可の問題に加えて、都市部では離着陸に必要な開けた場所を確保できない場合があるからです。

今回のプロジェクトでは、中心市街地の近くにある広々とした運動公園を利用しました。フライト中、建物や木々、ローカルWi-Fiによってデータリンク接続が妨害されることがありました。その結果、適切に補正された(RTK-Fixed解が得られた)カメラ位置は、わずか71%にとどまりました。
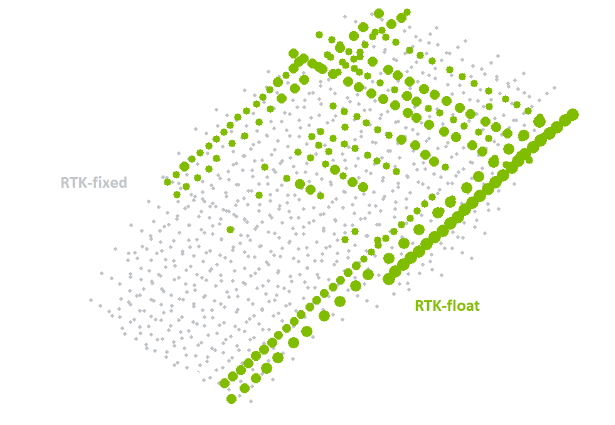
実際の作業時には、RTK-Float解(位置が適切に補正されない)が不均一に分布する結果となり、全体の精度を高めることが困難でした。
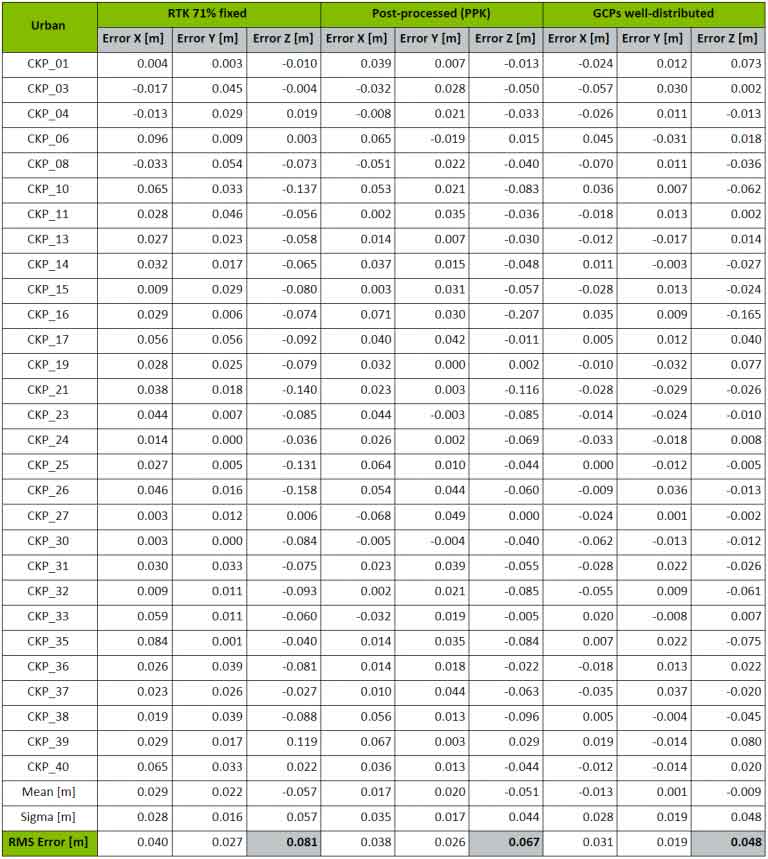
この結果から、障害物によって接続が切断される状況ではRTKモードのフライトの方が不利になることがわかりました。こうした条件下では、PPKで結果を改善することが出来ます。GCPを使用する場合よりも常に高い精度を得られるとは限りませんが、今回のテストではほぼ同等の精度が得られました。
RTKモードでのフライトについては、RTK-Float解となる場所に近いカメラ位置ほど誤差が大きくなる一方、後処理の結果では領域全体で誤差が均等になる傾向が見られました。
用途に適したツール
平坦な地形でも起伏に富んだ地形でも、農地のように障害物がなくデータリンク接続が安定している場所では、RTKモードのフライトによって地形を非常に細かく捉えることができ、GCPを__一切使用しなくても__極めて高い精度が得られます。
植物や農作物などのマッチングしづらい特徴点が高い密度で画像に含まれる場合には、マッピングにRTKドローンやPPKドローンを使用することが特に効果的です。GCPを配置できない場合や、GCPの配置場所が限られる場合でも、精度に優れた高品質の出力を確実に得ることができます。


一方で、市街地では事情が異なる場合があります。一部の場所で接続が切断された場合、RTK-Float解となるカメラ位置が不均一に分布するという結果を招き、全体的な精度を高めることが難しくなります。今回のテストでは、PPKの方がRTKよりも高い精度を得られたものの、どちらもGCPを適切に配置して処理したフライトの精度には及びませんでした。
ここまで、双方のソリューションの出力の品質についてご紹介してきました。しかし、実現性、時間、コスト、現地の状況などの要素にも留意する必要があります。
現地の足場が不安定、立ち入りが困難、安全確保に懸念があるなど、さまざまな理由からGCPを測位できない場合があります。また、個々のGCPを計画して測位を実施するまでに長い時間がかかることがありますが、後処理なら通常は10~20分程度で完了します。費用面に注目すると、RTKドローンやPPKドローンは1回購入すれば済むのに対し、GCPの測位にはプロジェクトの地域ごとにコストが発生します。長期的に見れば、RTKドローンやPPKドローンを導入する方が投資として効率的であると言えます。
ただし、RTKドローンやPPKドローンの導入を進める際には、現地の基地局やVRSネットワークへのアクセスが許可されているかどうかも忘れずに確認してください。アクセスできなければ、自前で基地局を準備する必要があります。
謝辞
この記事の作成にあたり、時間や機材をご提供頂いた皆様に感謝します。
| senseFly | eBee Plus ドローン |
| EPFL TOPO lab | the Javad Triumph RTK |
| データ取得 | Dai Shi, Lisa Chen |