マッピング範囲400km²、画像数21,000枚:揚子江マッピング
中国最大の港の1つ、鎮江。この内陸河港を通過した貨物の量は、2013年だけでも1億4千万トンを超えています。揚子江と大運河の双方の近くにあることから、鎮江は数世紀にわたって重要な輸送拠点となっています。
しかし、同市に多大な繁栄をもたらすこの水路では、しばしば氾濫が起きています。
氾濫リスクの分析、川岸の自然環境の保護および管理、川岸の開発利用状況の把握を目的として、People’s Municipal Government of Zhenjiangは 高解像度のオルソ画像を作成しました。ドローンとPix4Dmapperを利用して、400平方kmを超える範囲のマッピングが行われました。

プロジェクト詳細
| 場所 | 中国 江蘇省 鎮江市 |
| 組織 | Zhenjiang Municipal Flood Control Bureau |
| ハードウェア | MMC Griflion M8 ドローン Sony A7R2 カメラ |
| ソフトウェア | Pix4Dmapper |
| フライト数 | 41 |
| フライト時間 | 15日間で40+ 時間 |
| 面積 | 400² km |
| 画像数 | 21,000 |
| 画像サイズ | 42 メガピクセル |
| プロジェクトタイムライン | 1ヵ月 |
| GSD | 8cm |
| アウトプット | 高解像度オルソモザイク |
Zhenjiang Municipal Flood Control Bureauは、揚子江から少し離れた場所にあります。2019年7月、同局の職員はオフィスに居ながらにして揚子江をはっきりと視認できるようになりました。ただし、窓から見たわけではありません。それを可能にしたのは、21,000枚の画像から作成された400平方km相当の巨大オルソ画像でした。
この揚子江プロジェクト以前は、同地域の治水計画マップ、水保全データ�、および関連情報はそれぞれ別々のファイルとして保管されていました。この巨大プロジェクトでは、すべてのファイルを1つのカスタムベースマップにまとめる必要がありました。
大規模ドローンマッピングで大規模プロジェクトに対応

Zhenjiang Municipal Flood Control Bureauの目標は明確なものでした。揚子江沿岸100km、両岸500mを収めた高解像度オルソ画像を作成することです。プロジェクトの対象範囲は、揚子江内の数個の島を含み、句容市西側の大道川から揚中市の西来橋鎮にまで及びます。
この400平方kmに及ぶ範囲を、わずか8cmの地上解像度(GSD)でマッピングすることが要求されていました。
大規模なドローンマッピングは過去にも実施例がありますが、これはどのような組織にとっても困難な作業です。Zhenjiang Municipal Flood Control Bureauは、保有するGriflion M8ドローンをこのプロジェクトに最適なツールだと考えていました。

垂直離着陸(VTOL)ドローンは、固定翼ドローンとマルチロータードローンの両方のメリットを備えています。マルチロータードローンと同様にさまざまな場所での離着陸に対応しながら、固定翼ドローンならではの高速飛行と長時間のフライトも可能です。
プロジェクトチームはMMC Griflion M8ドローンを採用し、高精度のマッピングを行うために高解像度カメラとRTK/PPKシステムを装着しました。
飛行前チェック:結果の精度を確保
RTK/PPKの精度には眼を見張るものがありますが、このように大規模かつ重要なプロジェクトを遂行するにあたっては、成果物の精度を確保することと、プロジェクトの成功を実証する手段が必要でした。
フライト開始の2日前、プロジェクトチームは調��査対象範囲の全域に追加の基準点を設置しました。 グラウンドコントロールポイントは、コリドーマッピングプロジェクトのベストプラクティスに倣い、中心をずらした「ジグザグ」パターンで丁寧に配置されました。グラウンドコントロールポイントすべてを測量したので、プロジェクトチームは成果物に絶対的な確信を持つことができました。最終的には、グラウンドコントロールポイントとチェックポイントが総計160個使用されました。

計画は実行段階へ
測量開始日の早朝、ドローンがモーターの唸りとともに飛��び立ちました。2.5メートルのオレンジ色の翼が、青空とコントラストをなしていました。
パイロットは離陸前に、事前に計画したルートをドローンにアップロードしました。高精度の再構築、および目標とする8cmのGSDを達成するために、前面オーバラップは75%、サイドオーバーラップは70%に設定されました。
41回予定されているフライトの初回フライトが始まりました。フライトが完了するまで、プロジェクトチームはドローンを追跡します。離陸から1時間後、Griflionは無事に帰還しました。RTK基地局は精度を確保するだけでなく、帰還地点にドローンを導く役割も担っています。
パイロットはドローンを簡単に点検した後、車に積み込み、次の離陸地点へと移動しました。その後数日にわたり、この作業がさらに40回繰り返されました。
毎日のデータ処理
ドローンのフライトは15日間に及びましたが、スタッフは全フライトの完了を待つことなく処理を開始しました。
Pix4DのMinyi Panは次のように説明します。「このプロジェクトの対象地域の広さを考えると、早期に処理を始めることが極めて重要でした。不足画像を撮影しなおすために測量済みのフライト範囲まで戻れば、時間とエネルギーの無駄になってしまいます。問題を早期に発見できれば、時間を大幅に節約できる可能性があります。」スタッフはデータをPix4Dmapperにインポートし、画像のオーバーラップをチェックしました。 Pix4Dmapperの高速処理オプションを使用するこ�とで、大規模なデータセットにも関わらず短時間でチェックを済ませ、品質レポートによって成果物の信頼性を確認できました。プロジェクトの規模の大きさと期間の長さから、天候に悩まされることになりました。太陽の光は毎日変化し、画像の明るさも変わるため、マージしたアウトプットに縞模様が生じてしまいました。
「晴れたと思ったら、たちまち嵐に変わることもありました。中国のこの辺りでは、6~7級の風速はめずらしくありません。しかし、悪天候などの課題に悩まされながらも、非常に満足の行く結果が得られました。」(Pan)
プロジェクトを通じて自然な色を得るため、一部の範囲で再撮像が行われましたが、それ以外の範囲については、色調調整だけで十分でした。
15日間にわたるフライトで400平方kmを測量し、解像度4,200万ピクセルの高解像度ドローン画像を21,000枚撮影しました。チームは高速処理後のデータを点検した後、さらに高度な再処理を行いました。
単純なワークフローで高精度の結果
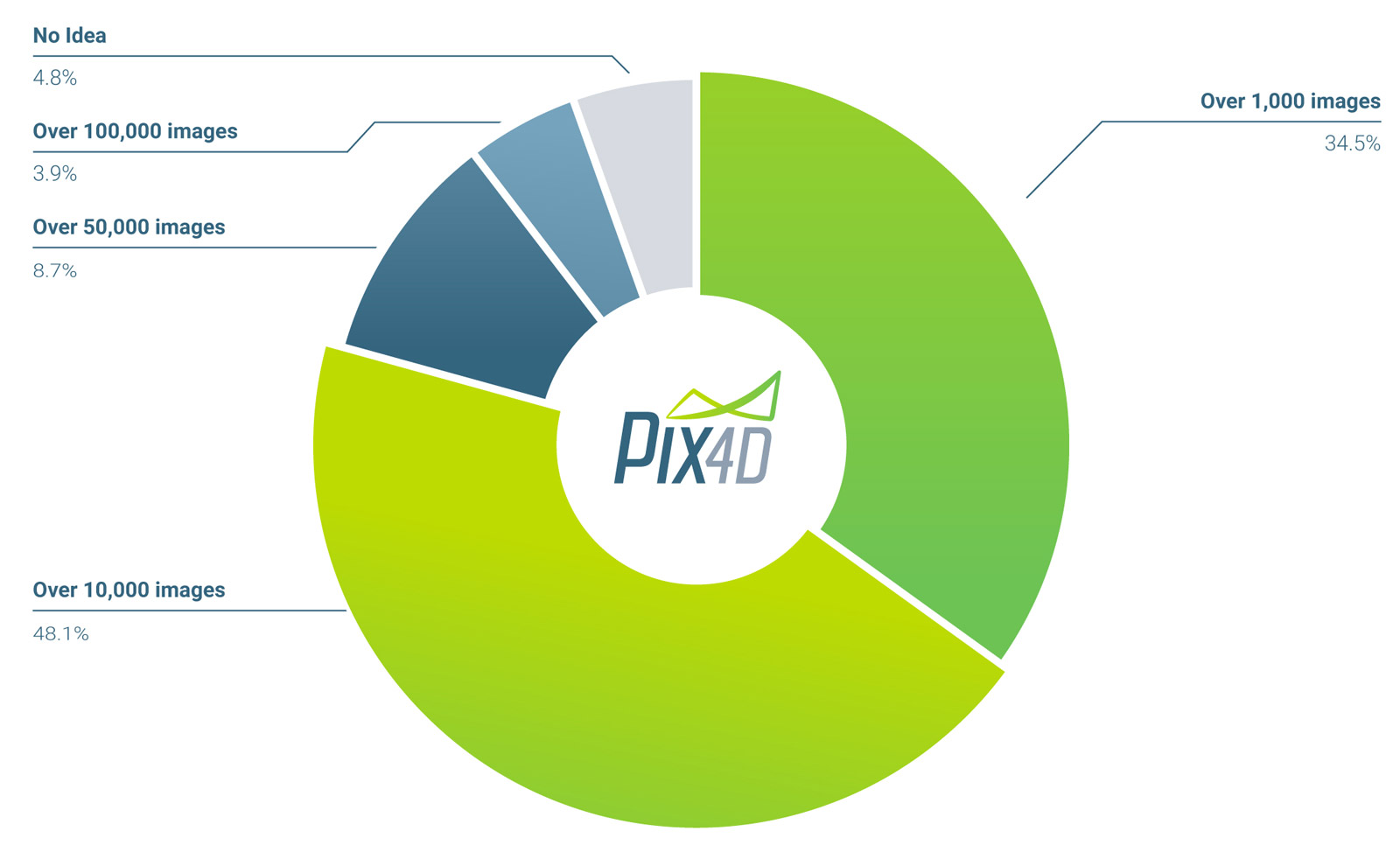
当社ユーザーを対象にした非公式の調査によれば、「大規模」プロジェクトとは1万枚以上の画像を含むものとする意見が多数派です。
この揚子江プロジェクトには、1枚42メガピクセルの画像が21,000万枚以上含まれています。
「大規模」プロジェクトの基準は?
しかし、この規模のプロジェクトであっても、Pix4Dmapperでの作業は単純なものでした。
RTK/PPKとグラウンドコントロールポイントのおかげで、標準的なワークフローで事足りたのです。「従来の3段階のワークフローで、作業の大部分をコンピューターに任せることができました。」と、Panは語ります。撮影した画像をスティッチングすることで、連続的で歪みのない測量可能な画像である、オルソ画像が完成しました。
標準設定で素晴らしい結果が得られました。データセットの規模が大きかったためPix4Dmapperの処理に多少の時間がかかったものの、スタッフによる操作は最小限で済みました。
グラウンドコントロールポイントのマーキングには、rayCloudが使用されました。いくつかのタイポイントを手作業でマーキングすると、残りのタイポイントはソフトウェアによって自動的にマーキングされます。多少の微調整が必要ではあったものの、プロジェクトチームはこの機能を「非常に快適で実用的」と評価しました。
プロジェクト要件に合わせてマッピングされたことを確認するために、品質レポートで結果のチェックが行われました。
大規模マッピングにドローンを使用する理由
この規模のプロジェクトでドローンが使用された例はあまりありません。しかし、軽飛行機はコストがかかりすぎ、運用も困難です。衛星画像も考えられるのですが、解像度が足りません。

地球の軌道上には無数の衛星が周回していますが、いつも最新の画像が手に入るわけではありません。わかりやすい例として、バスケットボール場の画像を挙げておきます。衛星画像の撮影時点では未完成でしたが、オルソ画像では簡単にバスケットボール場だと特定できます。

オルソ画像には、スティッチングされた衛星画像に勝るメリットがもう1つあります。それが精度です。 地形が完全に平坦な珍しい地域でない限り、スティッチングされた画像には写真が不揃いに並んだアーティファクトが生じてしまいます。変換後のオルソ画像には、DSM(数値表層モデル)により地形の高さが反映されています。ドローン画像を使用して生成されたオルソ画像の方が、精度に優れています。
このオルソ画像の自然な色合いは十分に満足できるものであり、オーバーラップが適切なためギャップもほとんどありませんでした。
写真測量では水面のオルソモザイク化が困難です。 いくつかの「穴」が川面に出来てしまいましたが、チームはrayCloudのサーフェスツールを使って穴をふさぎ、完成モデルの見た目を改善することが出来ました。

最終的な成果物が得られたのは、ドローンの初回フライトからわずか1か月後のことでした。
「データアノテーションの観点では、これらのオルソ画像の精度と解像度はニーズを十分に上回るものでした。」と、Zhenjiang Municipal Flood Control Bureau局長は語っています。 「Pix4Dは性能だけでなく使いやすさにも優れています。専門知識があまりない人でも、短期間で使い方を習得できました。」同局長はさらに続けます。「当局では普段、局内の人員だけで小型ドローンを使用し、小規模な河川や湖を撮影しています。職員はデータ処理を実行して、高精度なオルソ画像を生成できます。 本プロジェクトで、Pix4Dを使用して数百平方km分のデータを適切に処理できたことから、広い範囲のデータを扱える自信がつきました。」
成果物が得られた後も、プロジェクトは継続中です。Zhenjiang Municipal Flood Control Bureauでは現在、揚子江のオルソ画像を定期的に更新し、このテクノロジーの適用範囲を鎮江市の他の河川や湖にまで広げる計画を立てています。プロジェクトチームは、今回のプロジェクトが手本となって、他の都市でも同様のドローンプログラムが開始されることを願っています。そうすれば、氾濫に対する地域の回復力を高められるだ��けでなく、最終的には6,300kmに及ぶ揚子江の全体がマッピングできるでしょう。
この記事についてご質問やコメントがありますでしょうか? Pix4Dのコミュニティでのディスカッション に参加しましょう!お待ちしております。