精度の未来へ:GCPの自動マーキング
グラウンドコントロールポイント(GCP)は、プロジェクトの精度を確保するためにとても重要です。しかし、GCPをマーキングする作業は時間がかかる手作業の工程です。この記事では、この手作業の工程を改善する新しい方法、Pix4Dの最新機能であるAutoGCPsをご紹介し、機能を使用する際に必要なステップについてご説明します。
AutoGCPs の機能は現在、Pix4Dcloud Advanced とPix4Dengineにてご利用頂けます。AutoGCPs がどの様に機能するのかをご説明する前に、まずGCPが何なのか、なぜ重要なのかをおさらいしましょう。
グラウンドコントロールポイント (GCPs)とは?
ドローンとフォトグラメトリ―(SfM)をお使いでしたら、グラウンドコントロールポイント(GCP)についてご存知でしょう。でも、実際には何のことでしょうか?
GCPはなぜ重要か? いつも必要?
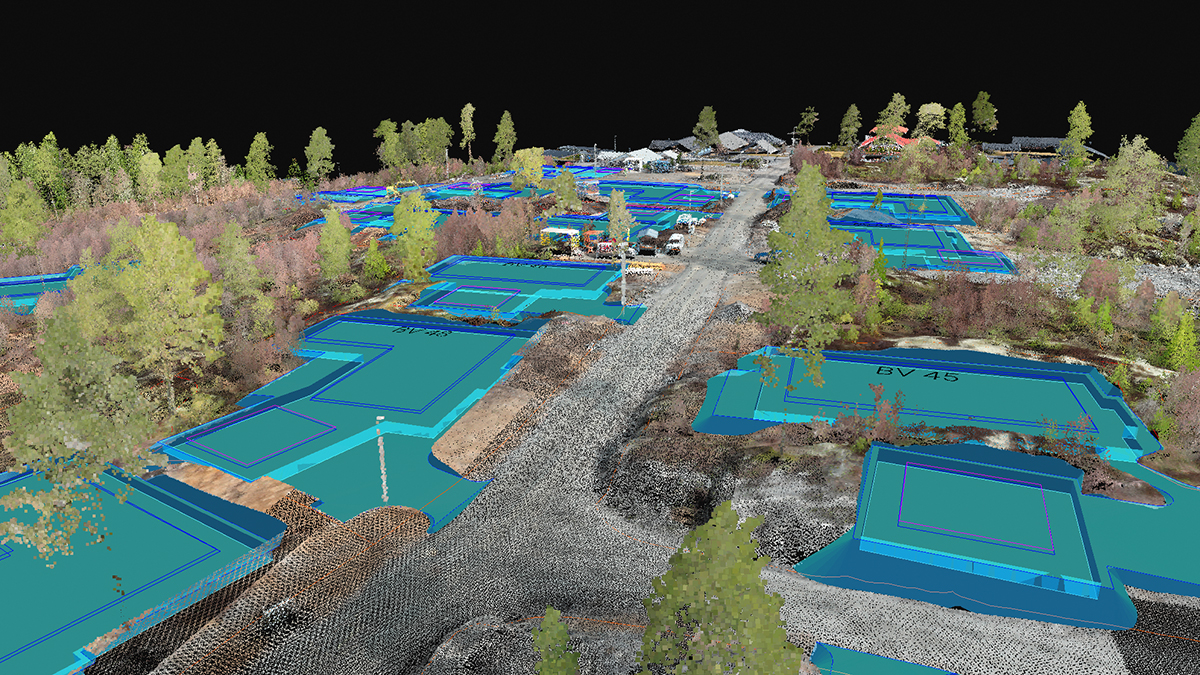
GCPがないと、プロジェクトはドローンのGNSS受信機のみを利用してジオリファレンスされます。あなたのプロジェクトの点群はいずれも、一般的に現実世界の位置から1~10メートル以内の位置に生成されます。この精度のレベルは、環境モニタリング や 3D モデリングプロジェクト といった、相対精度のみが必要とされる場合、十分かもしれません。しかし、土地調査、土木、地形測量、または体積計算には、業務を完了させるために一般的に更に高い精度レベルの結果が要求されます。
GCPを含めることで、プロジェクトの絶対精度を±数メートルから、±数センチまで向上することが出来ます。
精確な結果を得るための次のステップ: AutoGCPs
プロジェクトのGCPを手作業でマーキングすることを避けることが出来るソリューションがあったならどうでしょう?
Pix4Dcloud Advanced と Pix4Dengineでご利用頂ける新しいAutoGCPs の機能では、GCPが自動的にマーキングされます。各画像でターゲットの中心点をピンポイントでマーキングするために長い時間をかける必要はもうありません。AutoGCPsがあなたのグラウンドコントロールポイントのターゲットを画像上でマーキングしている間に、他の作業を進めて頂くことが出来るようになりました。
Pix4Dcloud Advancedで使うAutoGCPs
Pix4Dcloud Advancedのブラウザーベースのプラットフォームで、GCPを使用したプロジェクトも処理して頂けるようになりました。
これには、ドローンで撮影した画像とご使用されたGCPについての基本情報(座標値、座標系、ターゲットのサイズ)が必要です。Pix4Dcloud Advancedへ情報をアップロードして頂ければ、残りはPix4Dのアルゴリズムにお任せいただけます。GCPターゲットをマーキングして、精確にジオリファレンスされた結果を提供します。Pix4Dは機械学習とコンピュータビジョンを組み合わせ、GCPの中心点をピクセルレベルの精度でほぼ瞬時にピンポイント認識することに成功しました。
処理が完了したら、品質レポ―トが添付されたお知らせのEメールが届きます。
※Pix4Dcloud Advanced のAutoGCPs 機能は、現在ベータ版であることをご承知おきください。
Pix4Dengineで使うAutoGCPs
Pix4Dengineは、フォトグラメトリー(SfM)をスケール化して提供することを目的としたプログラミングモジュールのセットです。
AutoGCPs はPix4Dengine SDKのお客様にご利用頂ける新しいモジュールです。画像内のGCPターゲットを自動的にアルゴリズムで認識します。
更に詳細な情報は、テクニカルドキュメンテーションをご参照ください。
自動オンライン処理を最大限に活用しましょう
高品質の画像と認識可能なターゲットはまず第一の前提条件ですが、時間を犠牲にすることなくあなたのプロジェクトの精度を向上するためには、他のベストプラクティスも考慮することが大切です。
AutoGCPs機能で最適な結果を得るための方法についてはこちらのサポート記事をご参照ください。