GCPの数とドローンマップの精度の関係
Nevada Department of Transportation(NDOT)は、ネバダ州の交通を支える総延長5,400マイル(8,690km)のハイウェイと1,000本を超える橋の計画、建設、運用、保守を担っています。
革新的な行政機関の多くが地図作成にドローンを導入していますが、NDOTも例外ではありません。精度が重視されるため、NDOTの担当チームではグラウンドコントロールポイント(GCP)をワークフローの標準として使用してきました。しかし、GCPの設置には時間がかかり、状況によってはGCPが不要な場合があるという説 もあります。
そこで、チームでは高精度の結果を得るために最低限必要なGCPの数を調べるために、複数回にわたるテストを実施しました。
プロジェクト詳細
| 場所 | ネバダ州、米国 |
| チームメンバー | Jason Rolfe |
| ハードウェア | DJI Phantom 4 Pro |
| ソフトウェア | Pix4Dmapper |
| 面積 | 34 エーカー (0.14km2) |
| GSD | 1.93cm |
| 画像枚数 | 318 |
理想的なGCP密度を調べるためのテスト
テストの実施場所として、NDOTが管理する稼働中の採石場が選ばれました。サイトの総面積は34エーカー(0.14km2)に及び、長さは約2,000フィート(610m)、幅は約900フィート(274m)に達します。また、最も高い位置にあるGCPと最も低い位置にあるGCPの高低差は約180フィート(55m)あります。サイトの東南側はハイウェイ50号線があり、それ以外の隣接地にはヤマヨモギが群生する原野が広がっています。
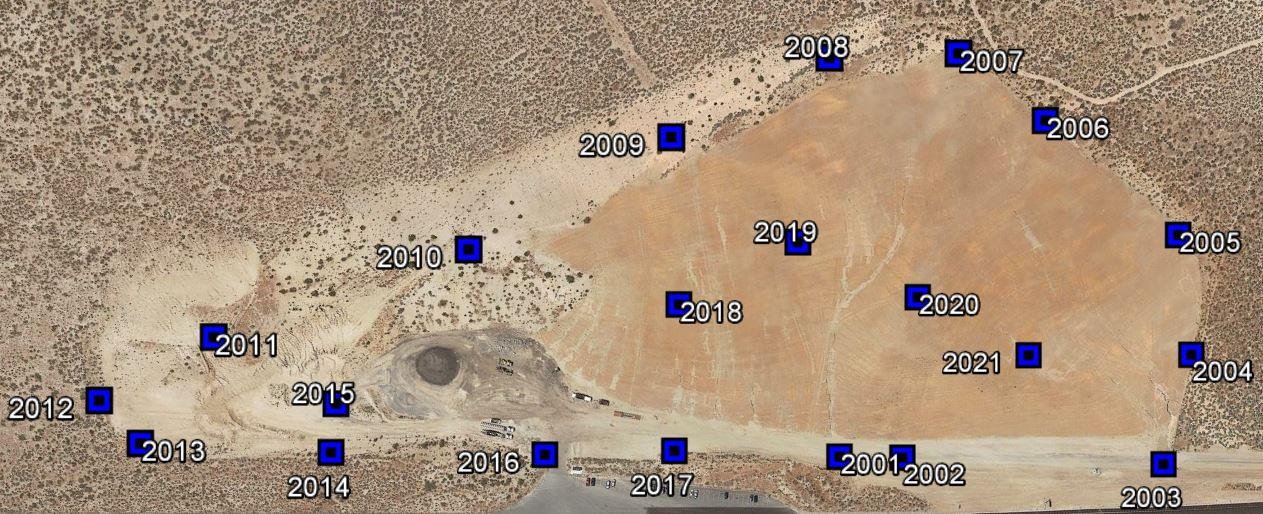
このプロジェクトサイト全体で21個のGCPが配置されました。GCPの測量は、携帯電話回線でVRSシステムに接続されたTrimble R10搭載RTKローバーを使用して実施されました。
撮影にはDJI Phantom 4 Pro、画像処理には写真測量ソフトウェアのPix4Dmapperが使用され、生成された点群には0~18個のGCPを使用したジオリファレンス処理が実施されました。プロジェクトのジオリファレンスに使用されなかったGCPをチェックポイントとして利用し、再構築後の値と実測値を比較しました。
全部で15セット以上の計算結果を作成し、それぞれの平均平方二乗誤差(RMSE)の値を比較しました。GCPの構成を変えながら、GCPの密度と位置に応じた精度の変化を調査し、点群を比較しました。

ドローンマッピングの方法
この34エーカー(0.14km2)の広さのサイトの調査は、DJI Phantom 4 Proを平均地上高(AGL)約60mで飛行させて実施しました。 地上解像度(GSD)を一定に保つために、地形の高さに合わせて飛行高度を調整しています。
ドローンの20メガピクセルカメラにより合計318枚の画像を撮影し、平均GSDは0.76インチ(1.93 cm)となっています。画像は前方オーバーラップ80%、サイドオーバーラップ70%で撮影されました。Pix4Dmapperを使用して処理し、精度を測定しました。
サイト固有の測量法
サイトのジオリファレンス処理は6個の測量標を基準にして行い、調査点を米国フィート単位の州平面座標系(NAD83 Nevada West)に変換しました。空撮ターゲットの測位は、携帯電話モデムで仮想基準点に接続されたTrimble R10 RTK搭載ローバーにより行いました。
グラウンドコントロールポイントとチェックポイントの働き
結果の精度を確保するために、NDOTの担当チームはGCPとチェックポイントの両方を使用しました。
現地でのマーク方法や測位方法については、GCPとチェックポイントで違いはありませんでしたが、Pix4Dmapperで両者を使用することで、再構築の精度に明確な効果が表れます。
Pix4Dmapperでは、GCPは、プロジェクトの調整に使用する固定アンカーポイントとして扱われます。ユーザーはPix4DmapperにGCPをインポートする際に、測量対象点の正確性を入力します。これにより、データのベストフィット処理を行う際の「余地」が指定されます。GCPはPix4Dmapper内でモデルの座標確定に使用され、最終成果物の精度にも影響します。
チェックポイントもPix4Dmapperに入力されますが、計算には使用されません。チェ��ックポイントは、再構築を実測値と比較するためだけに使用されます。
精度の分析
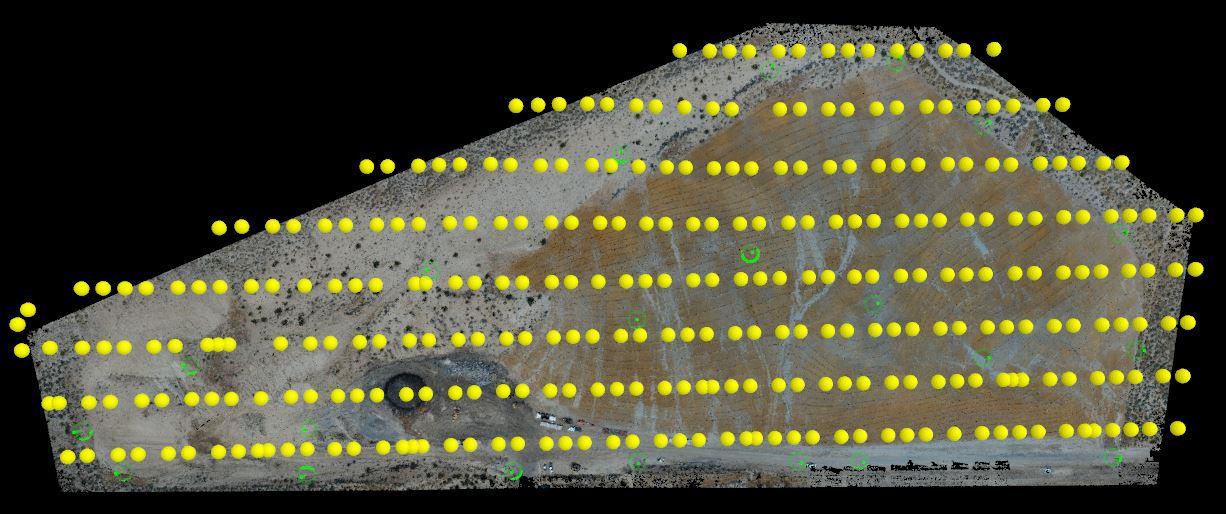
精度を確保するために最低限必要なGCPの個数を調べるために、採石場全体に21個のGCPを配置しました。このGCPを、処理ステップで段階的にチェックポイントに置き換えていきました。
言うまでもなく、GCPからチェックポイントへの置き換えによって最も大きな影響を受けるのは、垂直方向の精度です。以降、この数値を中心に説明を進めます。
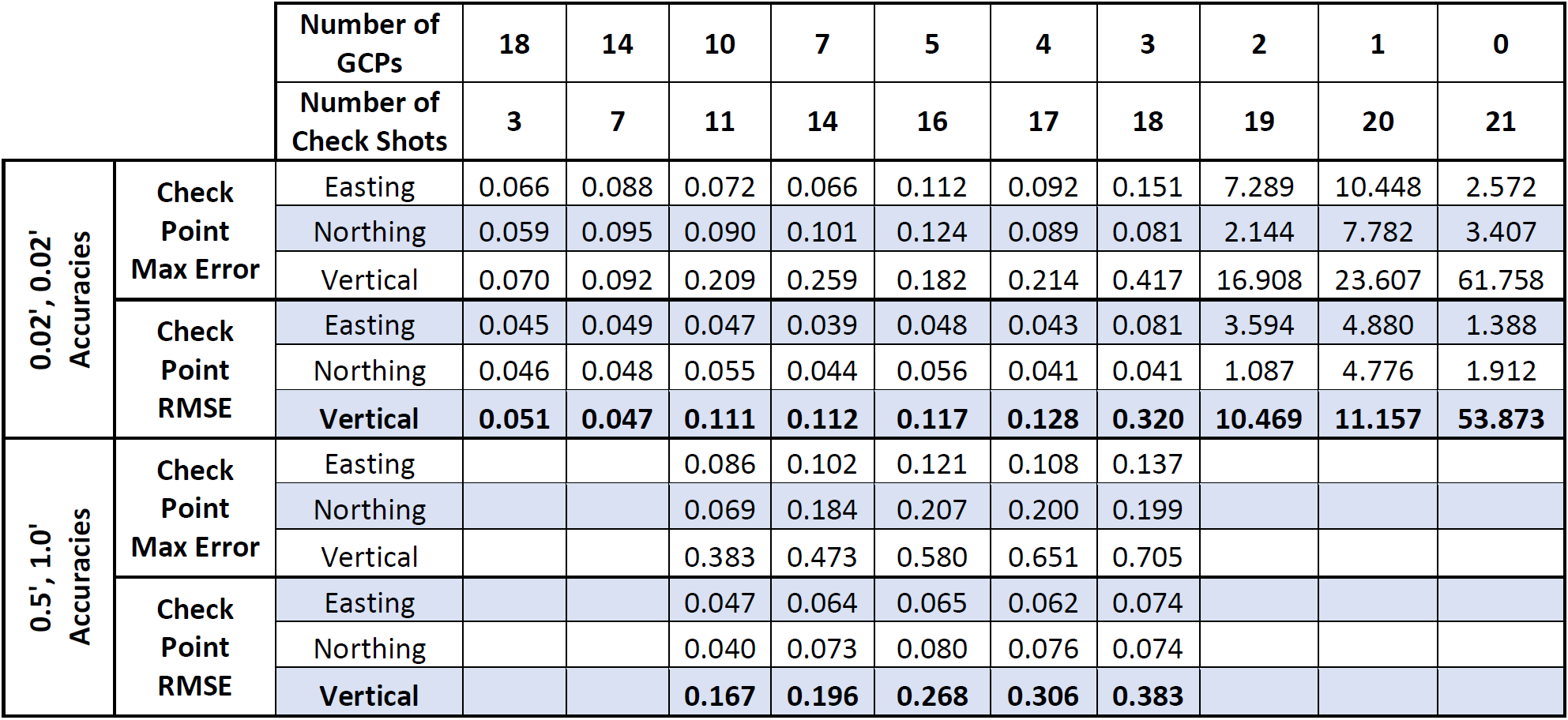
垂直方向のRMSEは、GCPが18~14個のときには約0.05フィートでしたが、10~4個では約0.1フィート(3.0cm)で横ばいになります。搭載GPSの精度がそれほど高くないため、GCPが4個を切るとRMSEが急増します。驚くべきことに、実用上問題ない測量精度を達成するために必要なGCPの数は、わずか4個程度だったのです。表1では同じGCP構成が使用されていますが、GCPの精度がこれよりも低かったため、プロジェクトの位置情報の誤差が大きくなったようです。このことから、当然のことですが、GCPおよびチェックポイントの入力精度が再構築に影響を及ぼすことがわかります。
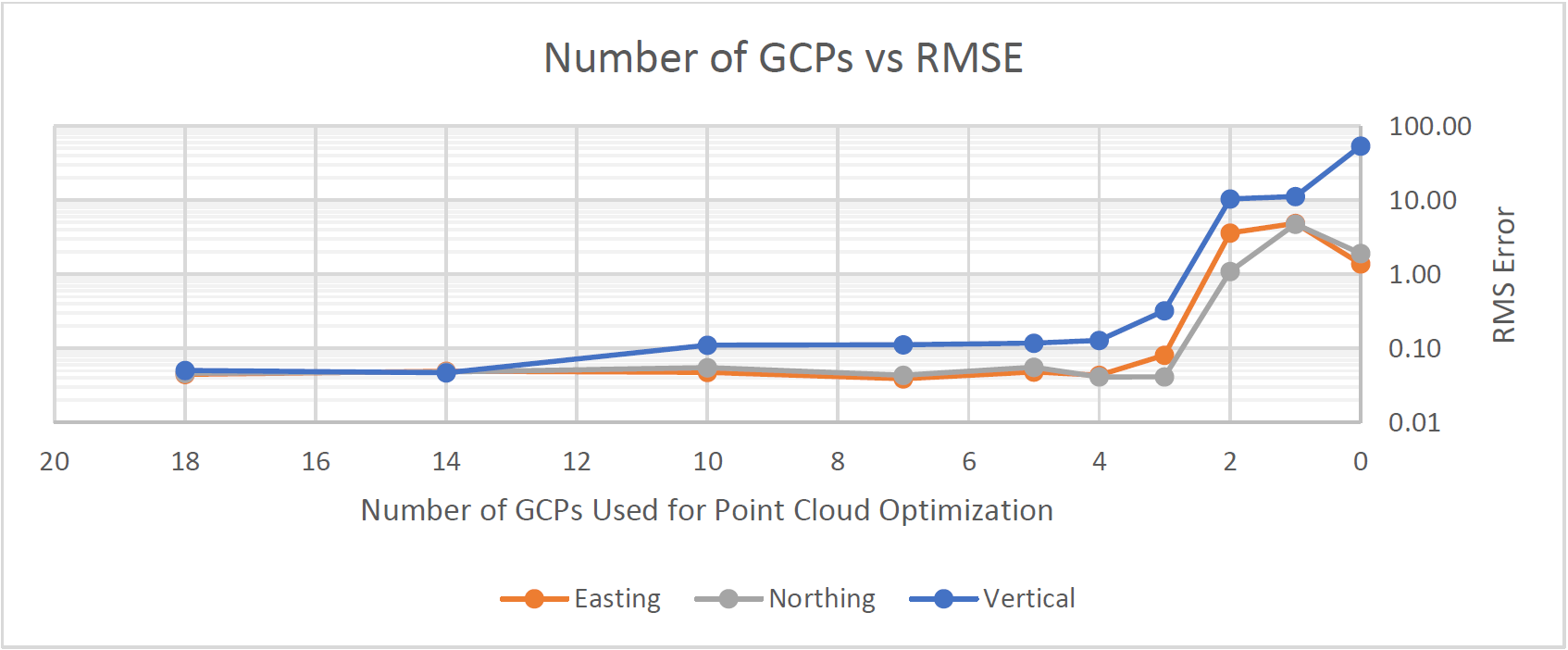
図4に、今回の測量のRMSEと使用したGCPの個数の関係を折れ線グラフで示しています。水平方向と垂直方向のRMSEはテスト全体を通じて似通った値ですが、垂直方向のRMSEが先に増え始めています。
地上解像度(GSD)と平均平方二乗誤差(RMSE)の関係
Pix4Dmapperは空撮画像の各ピクセルを識別して、別々の画像でも識別可能な点で構成されるネットワークを作成します。そのため、最終的な再構築の精度が、元画像の解像度、つまり地上解像度(GSD)を超えることはありません。
Pix4Dで実施した計算によれば、テストデータのGSDは1ピクセルで約0.75インチ(1.9 cm)でした。
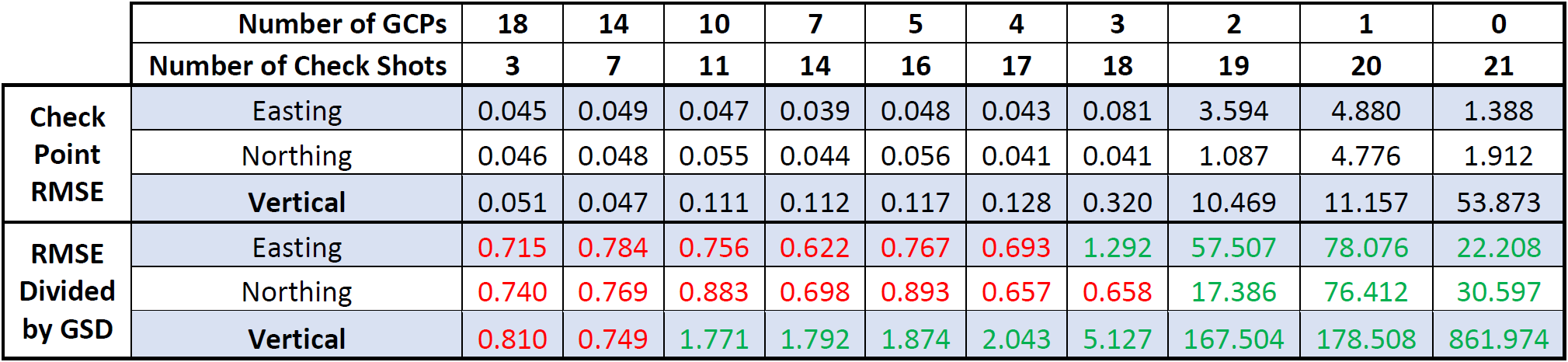
この表から、GSDとRMSEの関係がわかります��。RMSEがGSDより小さい場合は赤い数字、RMSEがGSDより大きい場合は緑の数字で値を示しています。
Pix4Dの基準設定プロセスでのターゲットの認識方法から、この種のプロジェクトではGSDを超える精度が得られることはありません。実質的に、このサイトと地形で最も効率的なGCPの個数は11~13個と考えられます。コントロール領域外の精度
一般的に、コントロール領域の外にある点群は信頼性が低いと見なされますが、完全に使い物にならないほど精度が落ちるのは、境界線からどれくらい離れた場合でしょうか。
たとえば、地形情報を調べようと考えていたエリアが、意図せずコントロール領域の外になってしまったとします。そのエリアがコントロール領域から10フィート、100フィート、あるいは1,000フィートも離れていたとしたら、得られた情報の精度を信用できるでしょうか。こうした問題は、地上から現地にアクセスできない場合や、危険すぎて対象エリアに徒歩で近付けない場合、データ収集後に対象エリアが変更された場合などに起こりえます。
図5に、サイト全体の相対高度の分布を示します。サイトの東端が最低地点、北北西が最高地点になっています。
図6~9では、GCPの配置を変えながら、コントロール領域の外にあるチェックポイントを評価しています。測定値とPix4Dで算出した値との垂直方向の差を青字で示し、尺度を線で示しています。グリッドのサイズは200 x 200フィート(61 x 61m)です。差が最も小さくなったのは、ほぼ平坦な道路上に並ぶ、最低地点付近のポイントでした。�図に示すように、最も低い測量点と最も高い測量点との総高低差は約180フィート(55m)です。
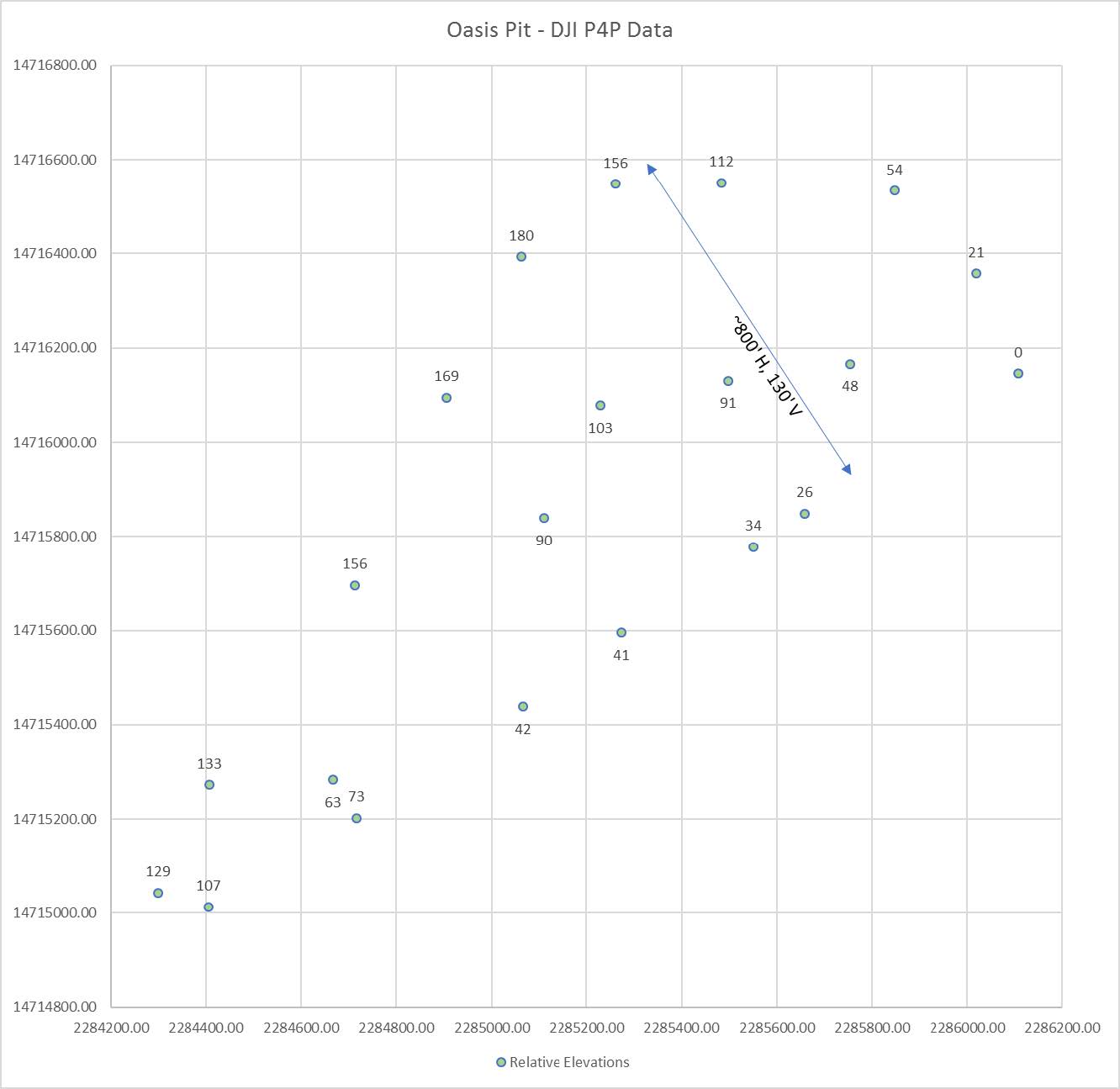
図5は、最低地点を0フィートとした相対高度を示しています。最高地点は採石場の上部に位置しており、相対高低差は約180フィート(55m)でした。
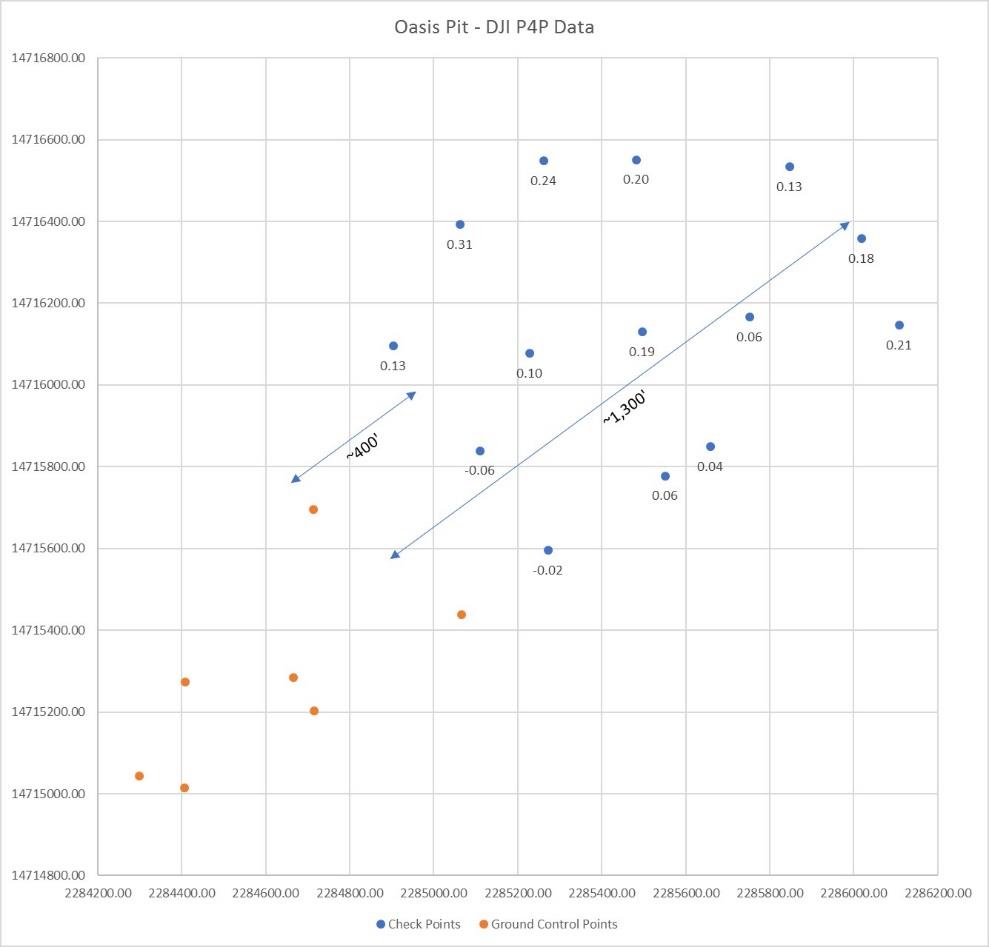
図6の場合、コントロール領域から最も遠いチェックポイントまでの水平距離は約1,300フィート(396m)です。サイトのチェックポイントまたはGCPの最低地点と最高地点の高低差は約180フィート(55m)です。標高は南東から北西に向かって高くなる傾向です。チェックポイントとPix4D算出値の垂直方向差が最も大きくなったのは採石場の頂部付近で、その差は約0.31フィート(9.4cm)でした。一般的に、水平方向の距離が大きくなるほど、垂直方向の起伏の変化が大きいほど、垂直方向の差も大きくなる傾向があります。
驚くべきことに、この差は距離を考えると十分に小さい値に収まっており、ほとんどの地形マッピングプロジェクトで許容範囲内と見なせる可能性があります。この構成全体での垂直方向のRMSEは約0.16フィート(4.8cm)でした。
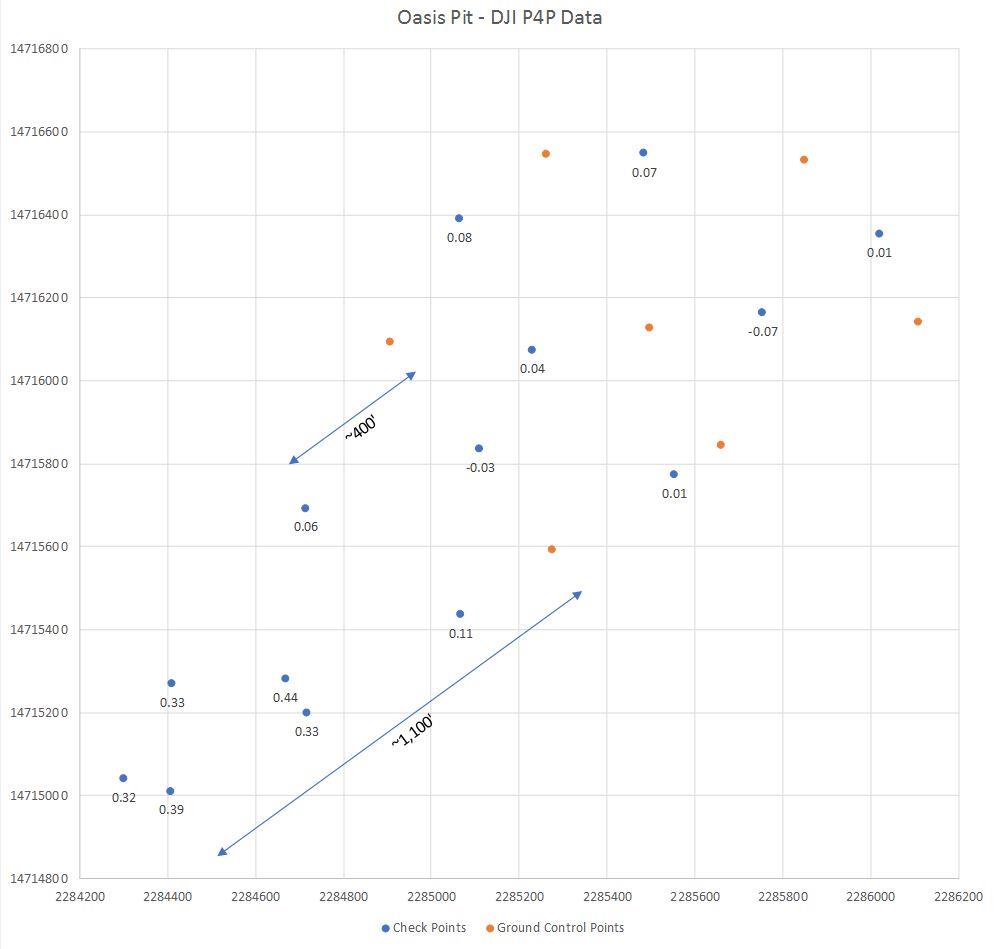
図7では、プロジェクトの東側にGCPを7個配置しており、残る14個のチェックポイントについて垂直方向のRMSE値を示しています。このように、コントロール領域の中にあるチェックポイントの精度は0.1フィート(3.0cm)程度ですが、コントロール領域から離れるほど垂直方向の差が大きくなっています。図7における垂直方向の差の最大値(0.44フィート/13.4cm)は図6を上回っているものの、一般的な地形マッピングやモデリングの用途には十分な精度だと言えるでしょう。この構成全体での垂直方向のRMSEは約0.22フィート(6.7cm)でした。
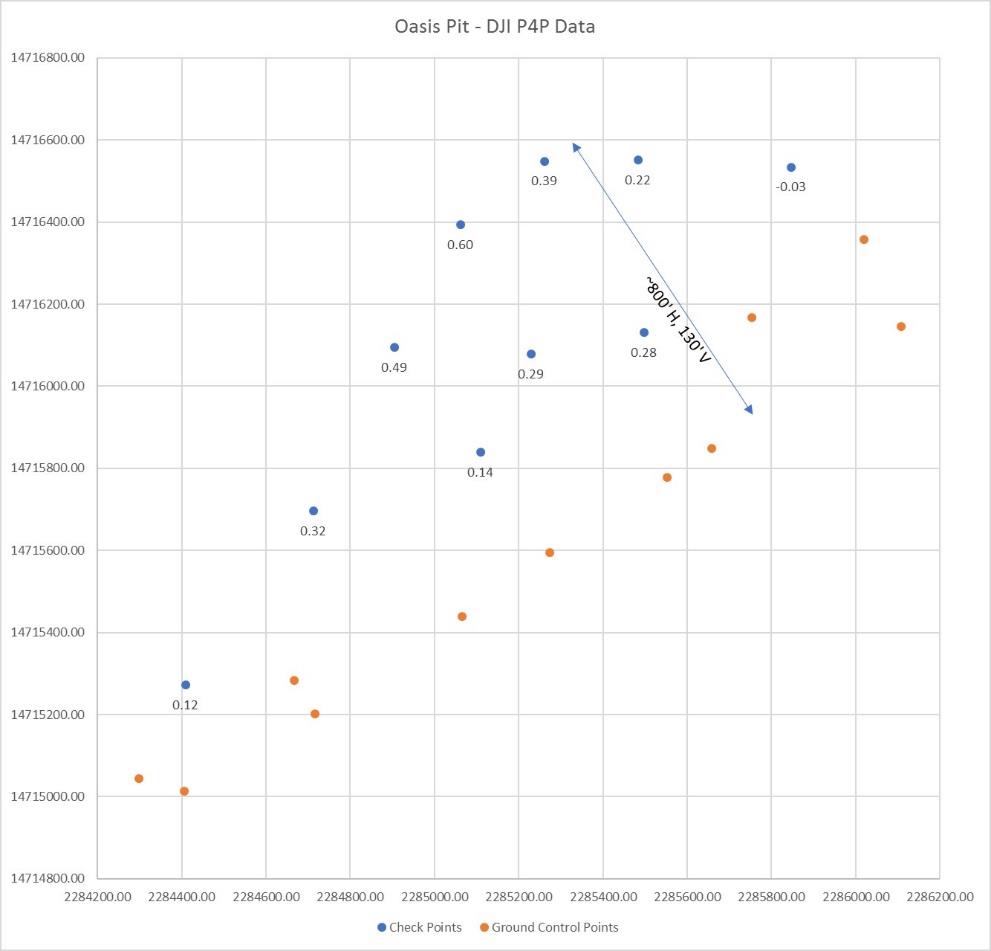
図8では、プロジェクトサイトの低い側に沿って、狭い帯状にグラウンドコントロールポイントを配置しています。図内の青矢印は、この帯に沿った水平方向と垂直方向の変化を示しています。このモデルにおける最大差は、採石場の頂部付近の0.60フィート(18.2cm)であり、全体としては垂直方向の起伏が大きくなるほど精度が低下する傾向が見られます。この例に示したGCP構成は理想的とは言えないものですが、道路コリドーのように細長い現場で、サイトへの立ち入りが難しい場合には、このような構成が使用されることがあります。この構成全体での垂直方向のRMSEは約0.33フィート(10.0cm)でした。
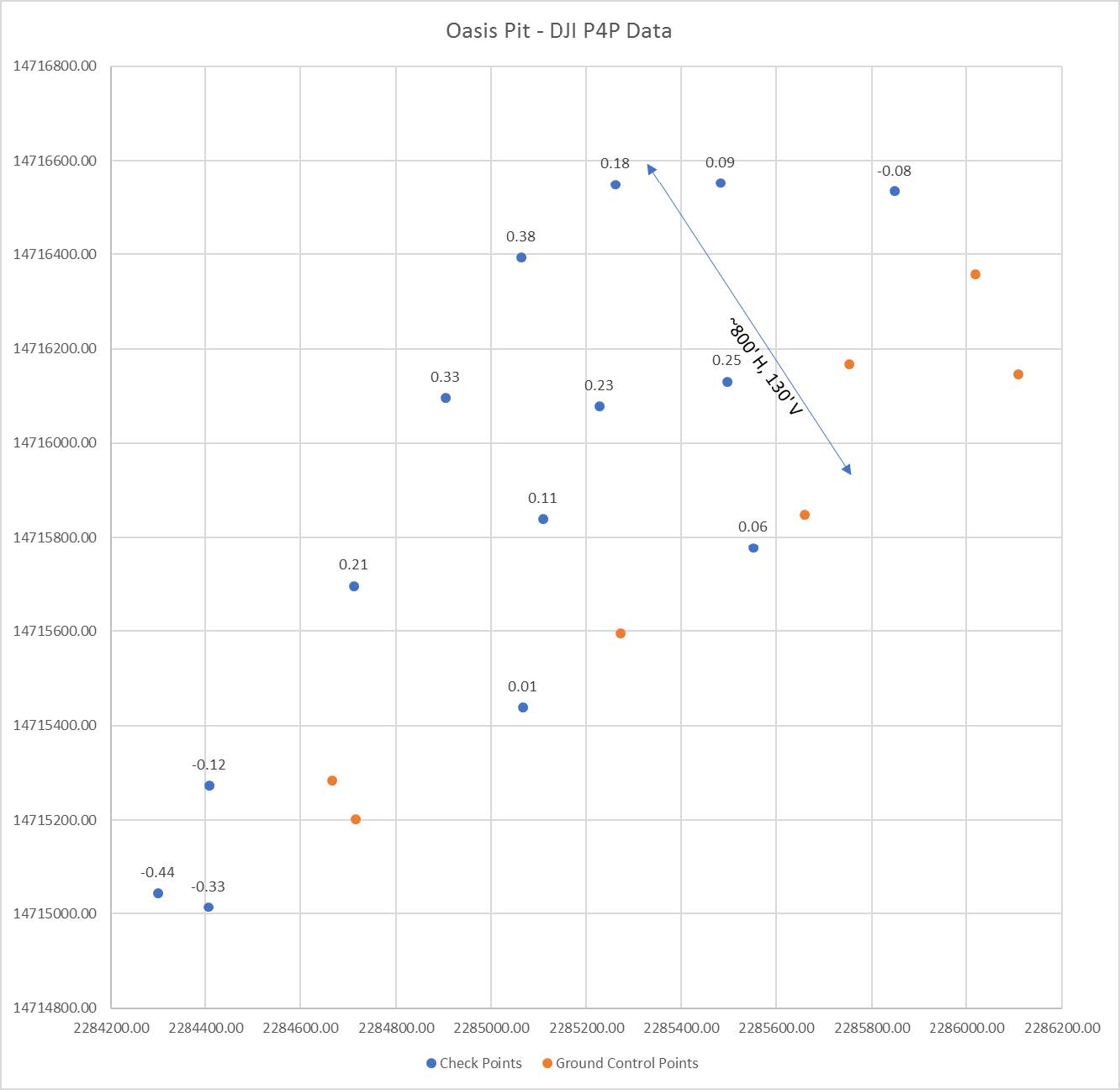
図9は図8に似ていますが、GCPが4個減少し、7個になっています。しかし意外にも垂直方向の最大差は0.44フィート(13.4cm)、RMSEは0.24フィート(7.3cm)に抑えられており、GCPの数が多い図8の構成よりもこちらのモデルの方が精度に優れている可能性があります。前述のように、垂直方向の変化が大きい場所ほど、垂直方向の誤差が大きくなる傾向があります。この例では、南西端の角部に当たる部分です。
GCPの個数を増やし過ぎても精度は向上しない
再構築の精度は、基本的にGCPの構成、個数、位置によって決まりますが、GCPの個数を増やしすぎてもメリットはほとんどありません。Pix4Dが推奨しているGCPの個数は5~10個程度であり、「GCPを増やしても精度が著しく向上するわけではない」という見解です。
テストの結果(表1)は、GCPの個数には、それ以上増やしても精度がほとんど向上しなくなる限界があるという認識を裏付けています。空撮用ターゲットの設置、測位、登録には時間がかかります。特に、GCPを追加することで精度をわずかに改善しても、その上昇幅が実際の地上解像度よりも小さくなると予想される場合には、かけた時間に見合う効果が得られるとは言えません(表2)。また、測量のコントロール領域の外側に3Dデータを外挿することも可能であり、これにより妥当な結果が得られると考えられます。もちろん、このようなデータは妥当とみなすことしかできず、再構築�の検証に使用可能なチェックポイントもないので、精度が最重要である場合に外挿はお勧めしません。外挿は、たとえば作業者の安全面への配慮や土地の所有権の問題からGCPを設置できない場合や、データ収集後に対象領域が変更された場合などに役立ちます。点群の精度は、特に地形の起伏に左右されやすいと考えられますが、再構築では1フィートを超えるような大きな変動は認められませんでした。
では、まとめましょう。精度の高いマッピングを実施するにはGCPが必須であり、ドローンやUAVのミッションを計画する際にはGCPのレイアウト検討が欠かせません。チェックポイントは使用することが望ましく、精度評価レポートでは重要な役割を果たします。こういった重要な要素を組み合わせて使用することで、エンドユーザー向けに測定および検証が可能な高精度の再構築を作成できるでしょう。