

RTK vs PPK droni vs GCP: quale fornisce risultati migliori?
Ultimo aggiornamento: 31 gennaio 2022
La precisione è di vitale importanza per i professionisti della mappatura, della fotogrammetria e del rilievo aereo con i droni. Ma con tanti metodi a disposizione, non è sempre chiaro quale sia il migliore.
Abbiamo testato droni RTK e non RTK in diverse condizioni reali per aiutarvi a capire qual è lo strumento migliore per voi.
Qual è la differenza tra i droni RTK e PPK?
La differenza principale tra i due è il momento in cui avvengono le correzioni di posizione. L'RTK corregge durante il volo, mentre il PPK corregge dopo.
I droni non RTK sono precisi?
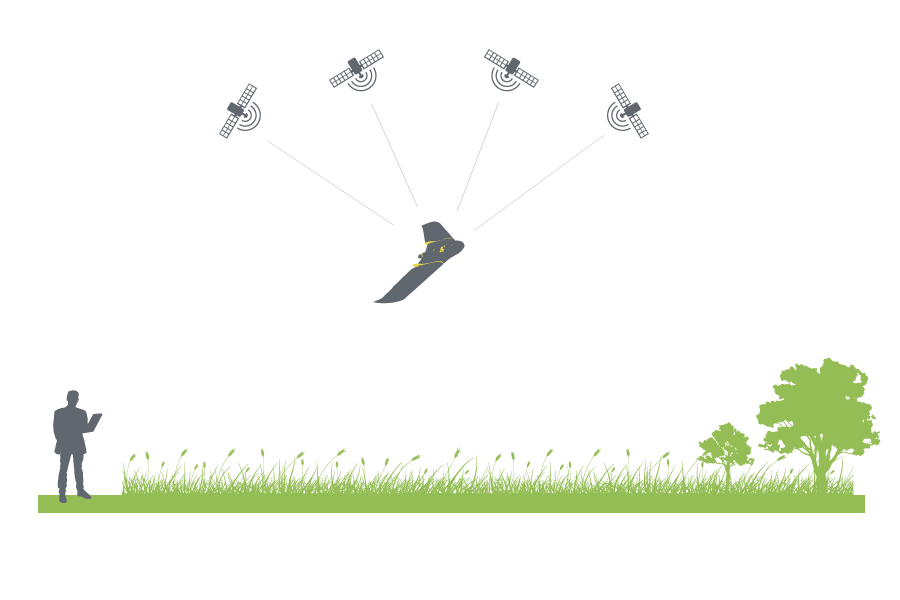
Quando si vola con un drone non RTK dotato di un ricevitore GPS a bordo o di un ricevitore insieme alla telecamera, le posizioni della telecamera sono trilaterate dai satelliti, quindi le loro posizioni sono identificate da diverse misurazioni della distanza.
Normalmente, si può prevedere un'imprecisione fino a diversi metri, soprattutto nelle direzioni Z, a seconda della qualità dell'apparecchiatura e della geometria dei satelliti.
Cos'è il GNSS e cos'è il GPS?
Un sistema globale di navigazione satellitare (GNSS) è una rete di satelliti che trasmette informazioni temporali e orbitali utilizzate per la navigazione e la misurazione del posizionamento. Un GNSS utilizza costellazioni di satelliti e si basa sul concetto di trilaterazione. In breve, i ricevitori GNSS determinano con precisione la propria posizione misurando la distanza da tre o più satelliti.
Alcuni esempi di GNSS sono Galileo GPS, GLONASS e BeiDou.
Il Global Positioning System (GPS) è un tipo di GNSS sviluppato dal Dipartimento della Difesa degli Stati Uniti per uso militare negli anni '70, ma poi reso accessibile anche ai civili. Il GPS è oggi il sistema GNSS più utilizzato al mondo e fornisce informazioni continue sul posizionamento e sulla tempistica a livello globale.
Cos'è la tecnologia RTK e come funziona?
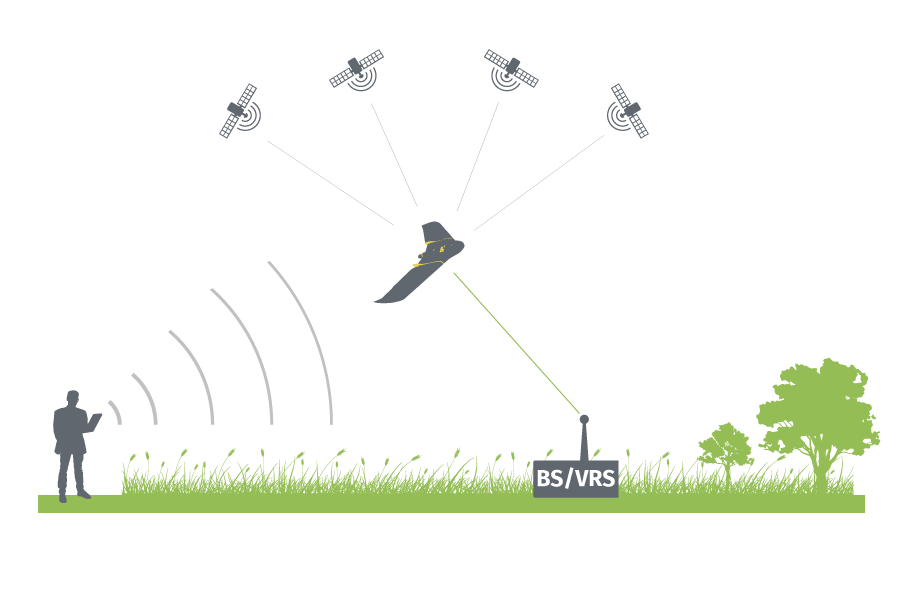
Un drone RTK ha a bordo un ricevitore GNSS RTK che raccoglie dati dai satelliti e da una stazione base per correggere con maggiore precisione la posizione dell'immagine in tempo reale mentre vola. A causa di questi collegamenti, il posizionamento RTK può avere dei lati negativi, come interruzioni del collegamento radio e blocchi del segnale. Le lunghe distanze tra il drone e la stazione base possono causare l'ostruzione dei segnali, con conseguente perdita di dati di correzione e una percentuale inferiore di posizioni precise della telecamera durante il volo.
Con una connessione data-link, come GSM o Wi-Fi, un drone RTK si connette a una stazione base o a una stazione di riferimento virtuale (VRS) tramite il laptop o il dispositivo che controlla il volo. Le posizioni della telecamera vengono calcolate in tempo reale, facendo riferimento ai riferimenti a terra, le cui posizioni sono misurate con precisione per un lungo periodo di tempo. I calcoli aiutano a correggere le posizioni della telecamera con una precisione di due o tre centimetri, sia in orizzontale che in verticale.
Vantaggi dell'RTK
- Non è necessario spendere tempo per posizionare i GCP in luoghi di difficile accesso.
- Nessuna necessità di post-elaborazione GNSS dopo il volo
- Le correzioni in tempo reale vengono effettuate utilizzando il posizionamento GPS in tempo reale del drone
- Migliore navigazione a waypoint, utile per ambienti difficili
- Atterraggio autonomo assistito con l'RTK
- Non è necessario alcun pacchetto software di post-elaborazione per il funzionamento in tempo reale
Tuttavia, non sempre le cose funzionano alla perfezione. Le persone che lavorano sul posto possono incontrare connessioni interrotte che interferiscono con le correzioni in tempo reale delle posizioni delle telecamere. Il sistema fornisce soluzioni float o addirittura torna alla modalità standalone. Le posizioni delle telecamere sono RTK-float, il che indica l'incertezza delle correzioni. L'accuratezza sarà ancora una volta di decine di centimetri per l'RTK-float, o addirittura di metri, come si otterrebbe da voli non RTK. In questo caso, è possibile eseguire correzioni PPK a condizione che il fornitore del drone lo faccia. Per questo motivo sarebbe vantaggioso utilizzare i GCP.
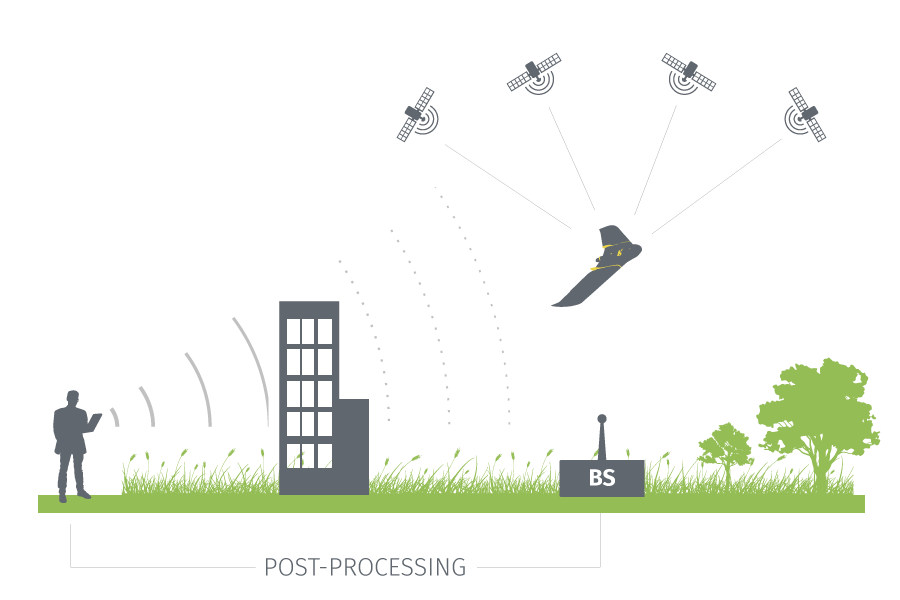
Cos'è un drone PPK e come funziona?
PPK sta per "Post-Processing Kinematic". In un flusso di lavoro PPK, il drone attribuisce geocoordinate a ciascuna immagine sulla base di un ricevitore GNSS a bordo. Sempre durante il volo, un'unità di base (che potrebbe essere una stazione di base GNSS o una rete CORS) registra anche le informazioni di posizione con una triangolazione più accurata.
Vantaggi del PPK
- Non è necessario spendere tempo per posizionare i GCP in luoghi di difficile accesso.
- Dati più completi grazie al fatto che non ci si affida a una connessione dati costante
- Maggiore flessibilità di volo in ambienti in cui possono verificarsi interruzioni della correzione in tempo reale
- Conservazione dei dati GNSS per dimostrare la responsabilità e rielaborarli se necessario
- Risparmio di tempo in loco, poiché non è necessario stabilire una connessione RTK
- Flessibilità nell'utilizzo delle stazioni base
- Nessuna necessità di radio a lungo raggio o rischio di interruzione del collegamento dati
- Posizionamento GNSS accurato per il drone dopo il volo
- Possibilità di elaborare con il solo GPS o con GPS/IMU in smoothing avanti-indietro
- Supporto dell'elaborazione GPS a doppia antenna
- Costi più bassi, perché non è necessario disporre di attrezzature per la misurazione dei GCP e si risparmia tempo non dovendo posizionarli
E i punti di controllo a terra?
Quale fornisce una migliore precisione? RTK, PPK o GCP?
L'uso di droni RTK/PPK è più vantaggioso rispetto a quelli non RTK se non si prevede l'applicazione di punti di controllo a terra(GCP) a causa di alcune limitazioni in loco o di procedure di misurazione difficili.
Tuttavia, un drone RTK/PPK deve essere abbinato a hardware e software specifici. L'intero sistema deve supportare la comunicazione con le stazioni di base o con i VRS e include funzioni di post-elaborazione. Tutte queste implementazioni ad alta tecnologia rendono i droni RTK/PPK molto più costosi di altri. È inoltre fondamentale disporre di un software di elaborazione delle immagini compatibile, come PIX4Dmapper, che tenga conto delle diverse precisioni delle posizioni delle singole telecamere.
Naturalmente, è possibile aggiungere l'RTK/PPK a un drone esistente, una scelta sempre più popolare. In questo articolo forniamo confronti di qualità tra voli RTK/PPK senza GCP e voli non RTK con GCP ben distribuiti. L'articolo può servire come prerequisito o riferimento per coloro che stanno decidendo se acquistare un nuovo drone o rimanere con i GCP.
Per analizzare meglio le prestazioni, abbiamo effettuato due voli separati: uno in modalità RTK e l'altro in modalità standalone (correzioni in tempo reale disattivate o connessione persa durante il volo) su due diversi tipi di regioni: campi coltivati e aree urbane.


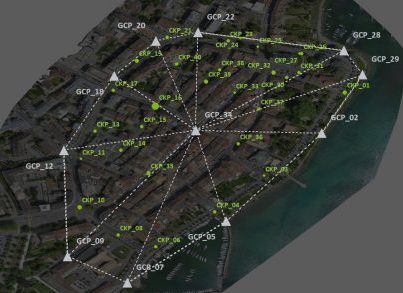
I voli sono stati eseguiti con un eBee Plus senseFly e i GCP sono stati misurati con Javad Triumph-ls. Sia i voli RTK che i voli autonomi della stessa regione hanno seguito le stesse configurazioni. Abbiamo utilizzato i GCP per regolare le posizioni della telecamera nei voli in modalità standalone e lo stesso set di punti di controllo per valutare l'accuratezza di entrambe le modalità.
Tutti i progetti sono stati elaborati con PIX4Dmapper, utilizzando il modello di mappa 3D predefinito.
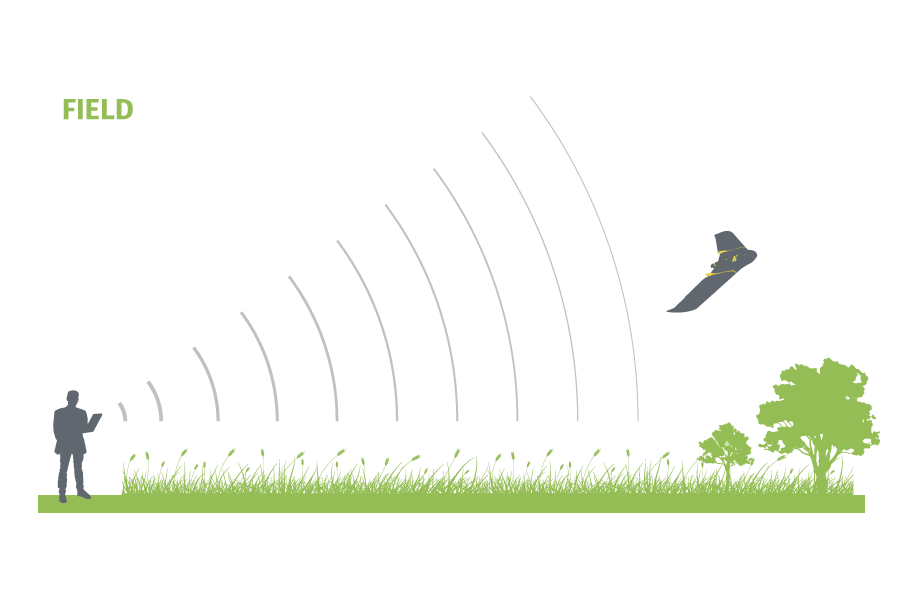
Il primo test: volo sul campo
Griglia singola, altezza = 102 m (GSD 2,5 cm), sovrapposizione 80%
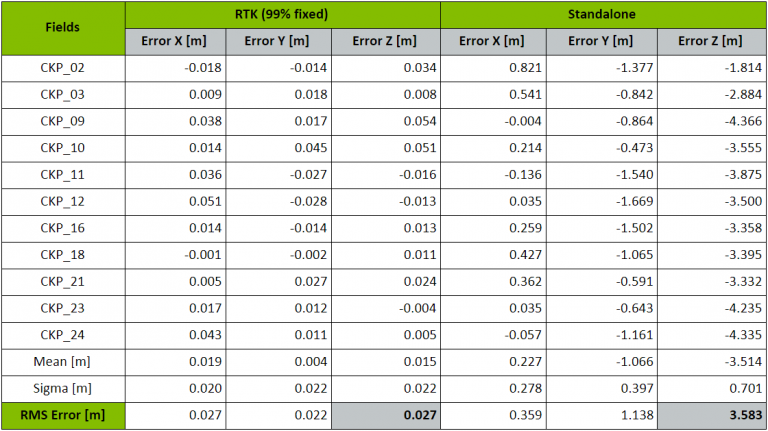
Sorvolando un campo, possiamo aspettarci che la connessione non incontri troppe ostruzioni. Il nostro volo RTK ha il 99% delle posizioni della telecamera fisse, quindi chiaramente non è necessaria alcuna post-elaborazione (PPK).
Qui confrontiamo l'accuratezza del volo RTK senza l'utilizzo di GCP e il volo in modalità standalone con GCP ben distribuiti. Il risultato del volo RTK sul campo è piuttosto impressionante.
Fornisce una precisione di circa un pixel (2,5 cm) in tutte le direzioni: X, Y e Z. In modalità standalone, otteniamo una precisione verticale di 3,6 metri, che si può prevedere senza applicare correzioni di posizione o utilizzare GCP.
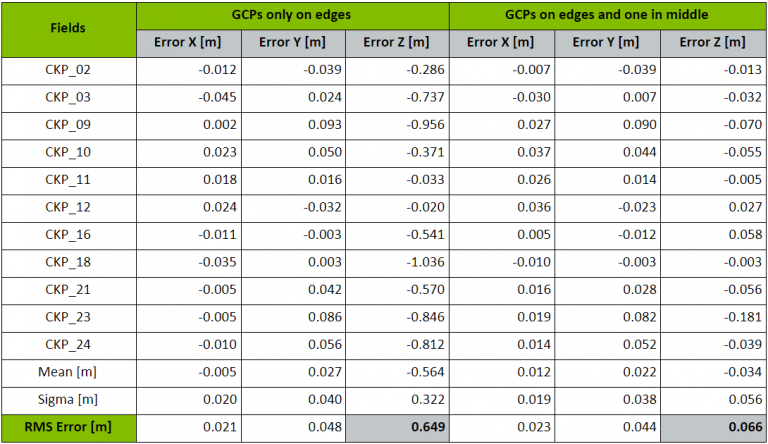
Una volta applicata una serie di GCP, gli errori in Z sono diminuiti notevolmente. Tuttavia, abbiamo anche scoperto che la distribuzione gioca un ruolo estremamente importante in questo tipo di progetto. Qui confrontiamo anche l'accuratezza quando si utilizzano i GCP in diverse distribuzioni:
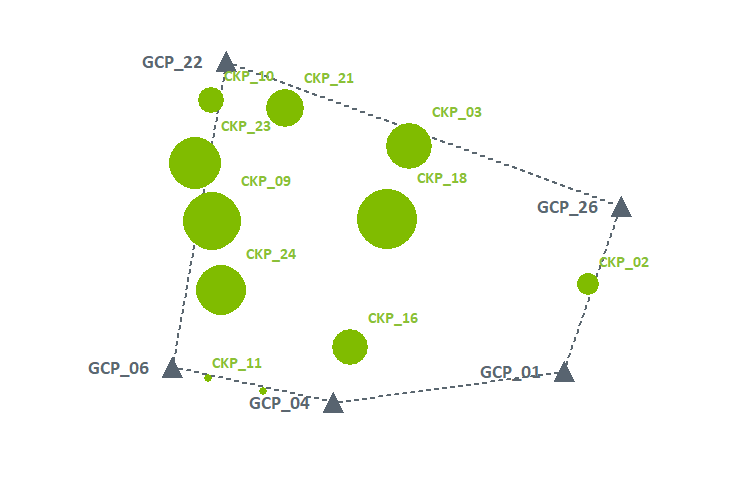
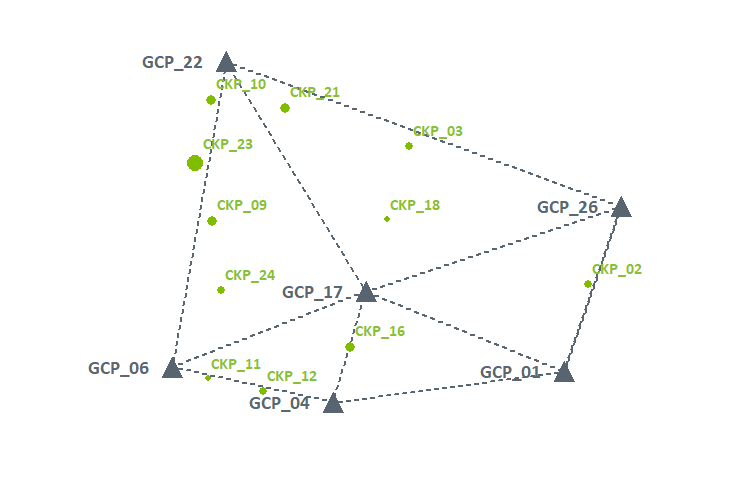
Dal grafico, si può notare che posizionando un GCP aggiuntivo al centro del campo, la precisione verticale è migliorata da 65 cm a circa 6,6 cm. L'errore si accumula quando ci si allontana dai GCP e quando il terreno circostante è vario e può includere ostruzioni: una regione difficile.
Per "regione difficile" si intendono i casi che potrebbero essere problematici per l'individuazione delle caratteristiche e la corrispondenza delle immagini, e i campi coltivati sono uno di questi. Le immagini scattate da queste regioni generano un maggior numero di errori di posizione che portano a una minore accuratezza. In questo caso, le posizioni precise delle telecamere (fissate al 99% in RTK nella prima fase) fungono da GCP densi e ben distribuiti.
Volo urbano
Griglia doppia, altezza = 102 m (GSD 2,5 cm), sovrapposizione 80%
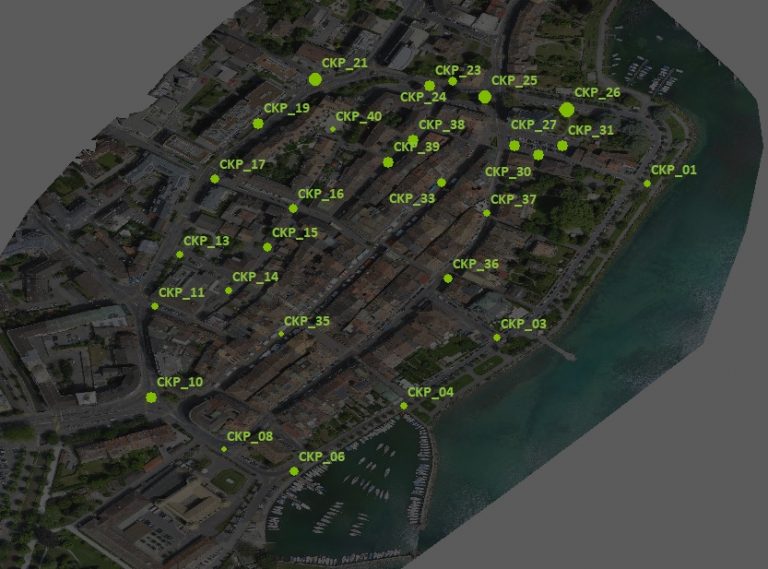
Il volo di un drone ad ala fissa su un'area urbana può essere più complicato. Oltre ai problemi di autorizzazione, è necessario un luogo aperto per il decollo e l'atterraggio, cosa non sempre fattibile nelle aree urbane.

In questo progetto abbiamo trovato un ampio parco sportivo vicino al centro città. Gli edifici, gli alberi e il Wi-Fi locale hanno interferito con le connessioni dati durante il volo. È risultato che solo il 71% delle posizioni della telecamera erano ben corrette (RTK-fixed).
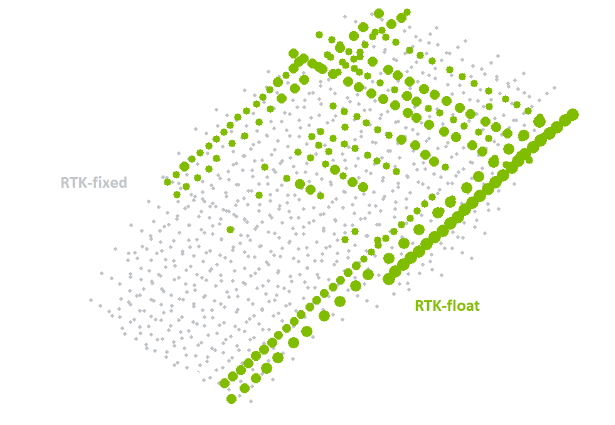
In situazioni reali, la distribuzione non uniforme di RTK-float (posizioni non ben corrette) ostacola il miglioramento della precisione globale.
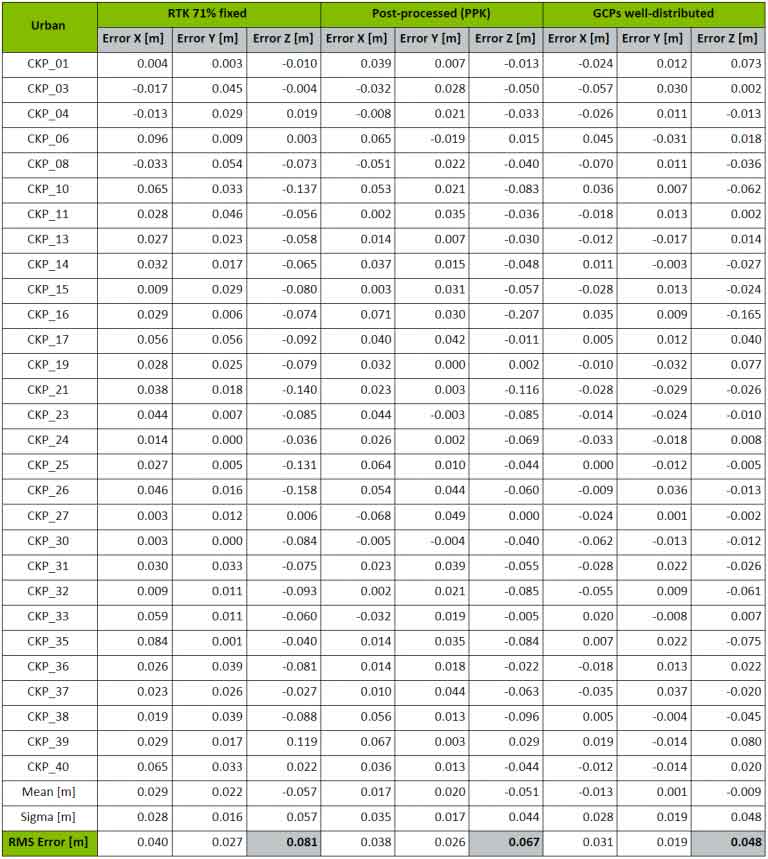
Dai risultati, abbiamo notato lo svantaggio del volo RTK quando la connessione è stata persa a causa di ostruzioni. In queste condizioni, il PPK migliora il risultato. Anche se non è garantito che sia sempre migliore rispetto all'uso dei GCP, nel nostro caso d'uso sono abbastanza vicini.
Nel volo RTK, abbiamo riscontrato errori maggiori in prossimità delle posizioni delle telecamere RTK-float, mentre nei risultati post-elaborati gli errori appaiono più uniformi nell'intera regione.
Chi vince la sfida PPK vs RTK vs GCP?
Per i campi o i luoghi (pianeggianti o con grandi rilievi) in cui le connessioni dati sono stabili e prive di ostruzioni, il volo RTK può catturare molto bene il terreno e fornire risultati estremamente precisi senza l'uso di GCP.
La mappatura con un drone RTK/PPK è particolarmente vantaggiosa in presenza di una fitta vegetazione, di coltivazioni o di caratteristiche difficili da rilevare nel contenuto dell'immagine. L'elevata precisione e la qualità dei risultati sono sempre sotto controllo, indipendentemente da dove si impostano o si possono impostare i GCP.
Inoltre, il metodo PPK è ideale per i voli più lunghi, soprattutto per le missioni BVLOS (Beyond Visual Line Of Sight).


Nelle regioni urbane, il funzionamento è diverso. In alcune zone si possono perdere le connessioni, il che porta a una distribuzione non uniforme delle posizioni delle telecamere RTK-float e rende difficile migliorare l'accuratezza complessiva. Nel nostro caso, il PPK ha fornito risultati migliori rispetto al volo RTK. Nessuno dei due, tuttavia, fornisce un'accuratezza migliore di quella elaborata con GCP ben distribuiti.
Ora abbiamo visto la qualità dell'output di entrambe le soluzioni. Tuttavia, ci sono cose che dobbiamo tenere a mente: la fattibilità, il tempo, il costo e il tipo di area che si vuole ricostruire.
Non sempre è possibile misurare i GCP per molte ragioni, come la fragilità del terreno, i punti irraggiungibili e altri problemi di sicurezza personale. Inoltre, la pianificazione e la misurazione dei GCP possono richiedere ogni volta ore, mentre la post-elaborazione richiede normalmente solo 10-20 minuti. Per quanto riguarda le spese, la misurazione dei GCP è un costo da sostenere per ogni area di progetto, a differenza del costo una tantum dell'acquisto di un drone RTK/PPK.
Tenete presente, però, che si risparmia comunque molto tempo quando si lavora con PPK e punti di controllo rispetto ai GCP. Potrebbe essere necessario impostare un solo punto di controllo sull'intero cantiere rispetto a 5-8 GCP, per valutare l'accuratezza del progetto.
Considerando quanto sopra, è importante notare che i GCP sono ancora parte integrante della mappatura con drone, in quanto consentono al drone da rilievo di produrre un rapporto di qualità accurato e di giustificare la validità della soluzione. Ci sono molti fattori da considerare prima di acquistare un drone RTK/PPK, ma a lungo termine sembra essere un buon investimento, soprattutto se si lavora in un settore industriale e si ha bisogno di risultati georeferenziati con estrema precisione.
Se siete pronti ad acquistare un drone RTK/PPK, non dimenticate di verificare se avete accesso alla stazione base locale o alla rete VRS se optate per la soluzione RTK/PPK. In caso contrario, dovrete comunque misurare le vostre stazioni base!
Ringraziamenti speciali
Un ringraziamento speciale a tutti coloro che hanno donato attrezzatura o tempo
| senseFly | il drone ebee Plus |
| Laboratorio TOPO dell'EPFL | il Triumph RTK di Javad |
| Acquisizione dati | Dai Shi, Lisa Chen |


