

¿Los drones RTK/PPK dan mejores resultados?
La precisión es de vital importancia para el mapeo profesional con drones y fotogrametría, pero con tantas opciones en el mercado, no siempre es evidente elegir la mejor.
Hemos puesto a prueba los drones de navegación cinética satelital en tiempo real, RTK (por sus siglas en inglés) vs no-RTK, en diferentes condiciones de la vida real para ayudarte a entender cuál es la mejor herramienta para tu próximo proyecto.
Drones RTK vs no-RTK
Drones No-RTK - son precisos?
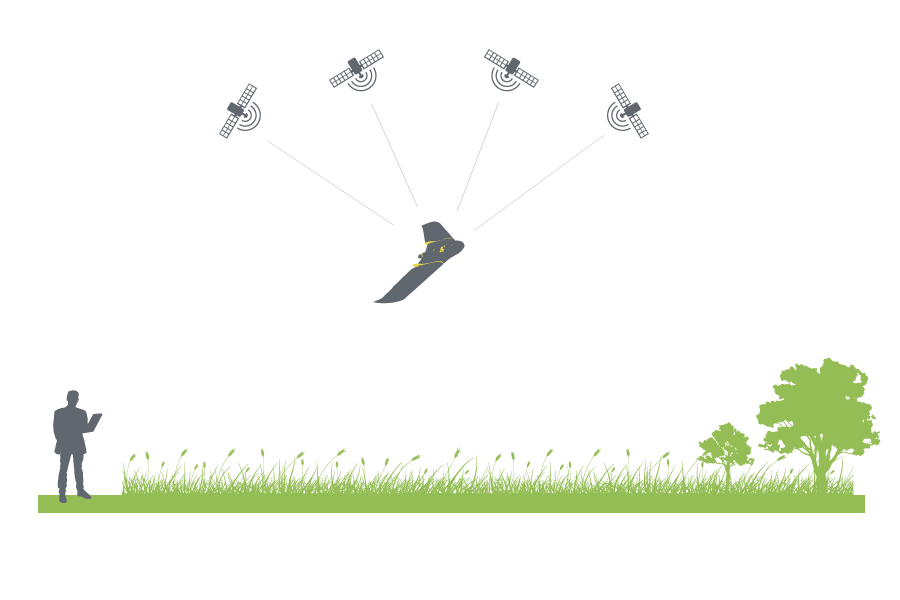
Cuando vuela un avión no tripulado-RTK con un receptor GPS a bordo o un receptor junto con la cámara, obtiene las posiciones de la cámara trilateral de los satélites, lo que significa que sus posiciones fueron identificadas por varias medidas de distancia.
Normalmente, encontrará una imprecisión de hasta varios metros, especialmente en las direcciones Z, según la calidad del equipo y la geometría del satélite.
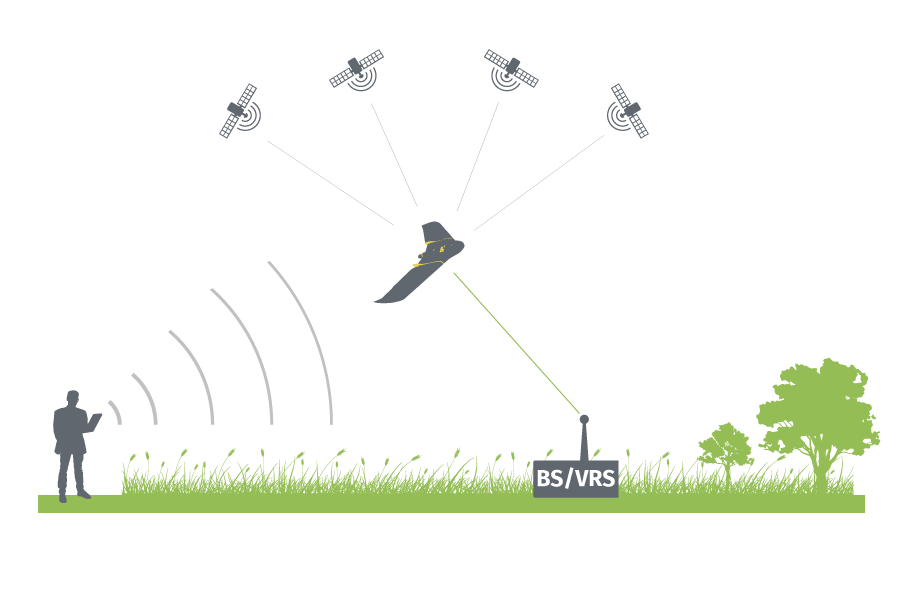
Drones RTK - dependen de un vínculo
Con una conexión de enlace de datos, como GSM o Wi-Fi, un dron RTK se conectará a una estación base o una estación de referencia virtual (VRS) a través de la computadora portátil que controla el vuelo. Las posiciones de la cámara se calculan en tiempo real, haciendo referencia a esta referencia de tierra cuya ubicación se mide con precisión durante un largo período de tiempo. El cálculo ayuda a corregir las posiciones de la cámara de hasta 2 a 3 centímetros de precisión, tanto horizontal como vertical.
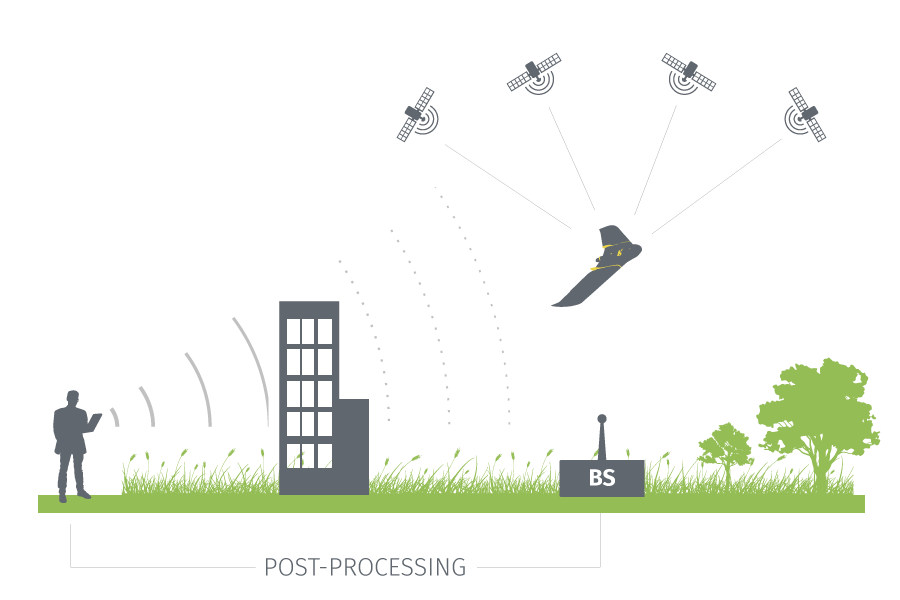
Sin embargo, las cosas no siempre funcionan a la perfección. Las personas que a menudo trabajan en el sitio pueden encontrar conexiones interrumpidas que interfieren las correcciones en tiempo real para las posiciones de la cámara. El sistema ofrece soluciones flotantes o incluso vuelve al modo independiente. Las posiciones de la cámara son flotación RTK, lo que indica una gran incertidumbre de las correcciones. La precisión volverá a ser de decenas de centímetros para RTK-float, o incluso hasta metros de precisión, como lo haría con los vuelos que no son RTK. En este caso, puede realizar el cálculo referente a la referencia de tierra después: cinemática post-procesada (PPK).
¿Qué ocurre si tiene puntos de control terrestre?
Qué le proporciona una mayor precisión? RTK, PPK, or GCPs?
Existe la ventaja de usar drones RTK / PPK sobre los que no son RTK si no tiene previsto aplicar ningún punto de control terrestre (GCP) debido a alguna limitación en el sitio o los dolorosos procedimientos de medición.
Sin embargo, un dron RTK / PPK necesita emparejarse con hardware y software específico. Todo el sistema debe admitir la comunicación con estaciones base o VRS e incluye funciones de post-procesamiento. También es fundamental contar con un software de procesamiento de imágenes compatible, como Pix4Dmapper, que tenga en cuenta las diferentes precisiones de la posición individual de la cámara.
Todas estas implementaciones de alta tecnología hacen que los drones RTK / PPK sean mucho más caros que los demás. Aquí proporcionamos comparaciones de calidad entre vuelos RTK / PPK sin vuelos GCP usados y vuelos no RTK con GCP bien distribuidos. Este artículo puede servir como un prerrequisito o una referencia para aquellos que están considerando si comprar un nuevo dron o quedarse con GCP.
Para investigar mejor el rendimiento, hicimos dos vuelos separados: uno con modo RTK y el otro con modo independiente (correcciones en tiempo real deshabilitadas o conexión perdida durante el vuelo) en dos tipos diferentes de regiones: Campos de cultivo y áreas urbanas.


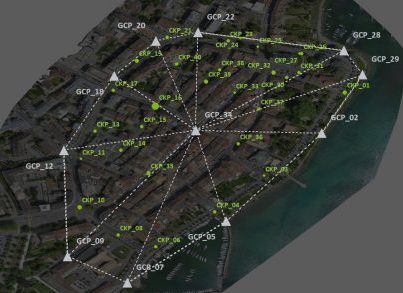
Los vuelos se realizaron con un senseFly eBee Plus y GCPs medidos con Javad Triumph-ls. Tanto los vuelos RTK como los vuelos independientes de la misma región siguieron las mismas configuraciones. Usamos GCP para ajustar las posiciones de la cámara de los vuelos en modo independiente y el mismo conjunto de puntos de control para evaluar la precisión de ambos modos.
Todos los proyectos se procesaron con Pix4Dmapper, utilizando la plantilla de mapa 3D predeterminada.
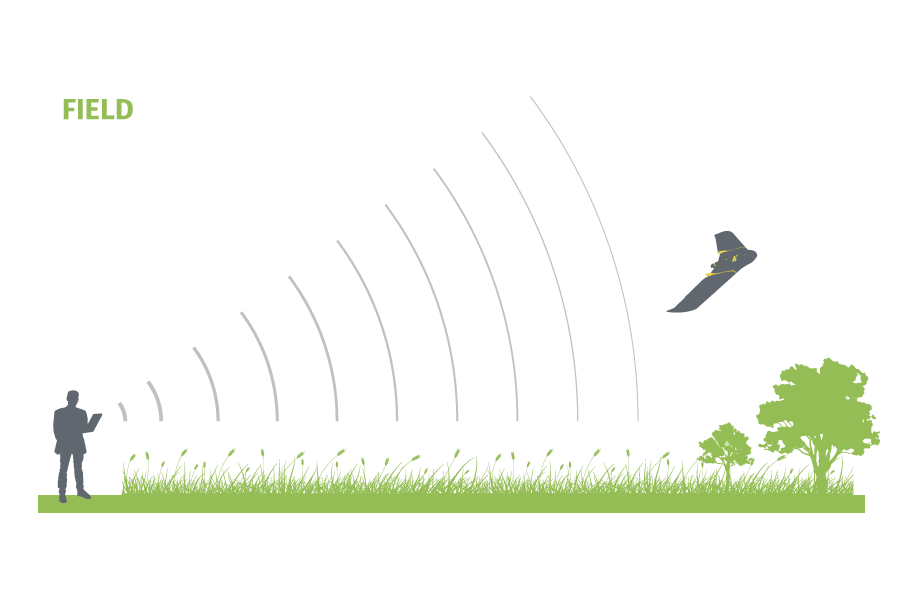
La primera prueba: vuelo de campo
Rejilla simple, altura = 102 m (GSD 2.5 cm), superposición 80%
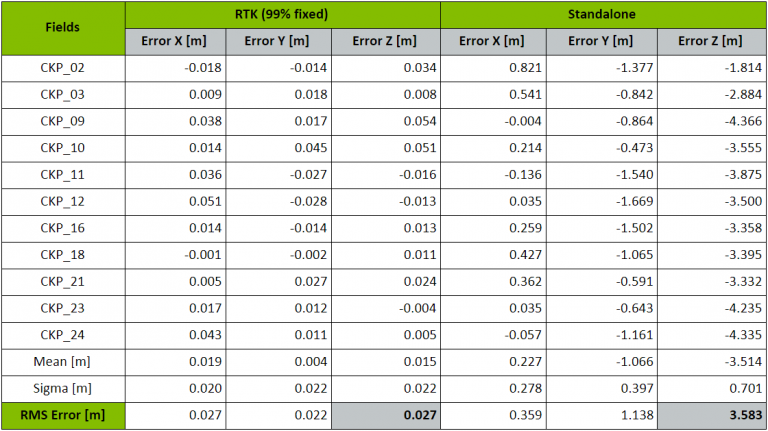
Mientras vuela sobre un campo, la conexión generalmente va bien sin demasiada obstrucción. Nuestro vuelo RTK tiene el 99% de las posiciones de la cámara fija tan claramente que no se necesita procesamiento posterior (PPK).
Aquí comparamos la precisión del vuelo RTK sin usar ningún GCP y el vuelo en modo independiente con GCP bien distribuidos. El resultado del vuelo RTK en el campo es bastante impresionante.
Da alrededor de un pixel (2.5 cm) de precisión en todas las direcciones: X, Y y Z. En el modo independiente, obtenemos 3.6 metros de precisión vertical, lo cual se puede esperar sin aplicar correcciones de posición ni usar ningún GCP.
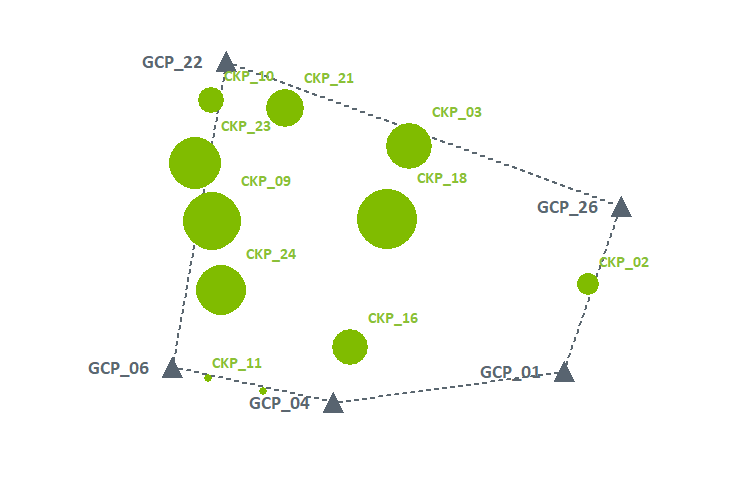
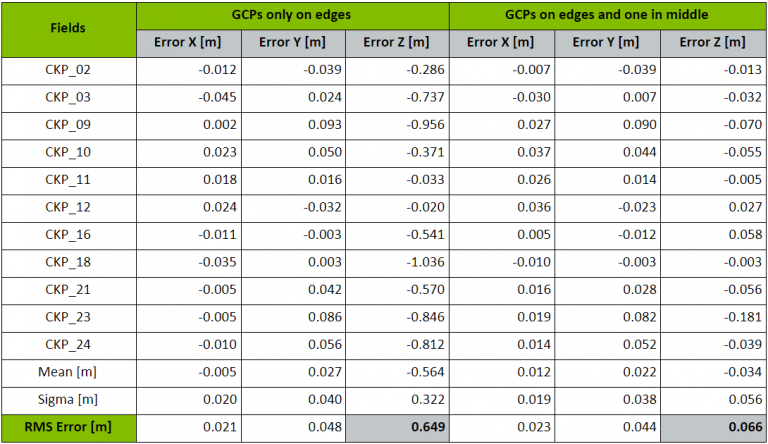
Una vez que aplicamos un conjunto de GCP, los errores en Z disminuyeron considerablemente. Sin embargo, también encontramos que la distribución juega un papel extremadamente importante en este tipo de proyectos. Aquí también comparamos la precisión cuando se utilizan GCP en diferentes asignaciones:
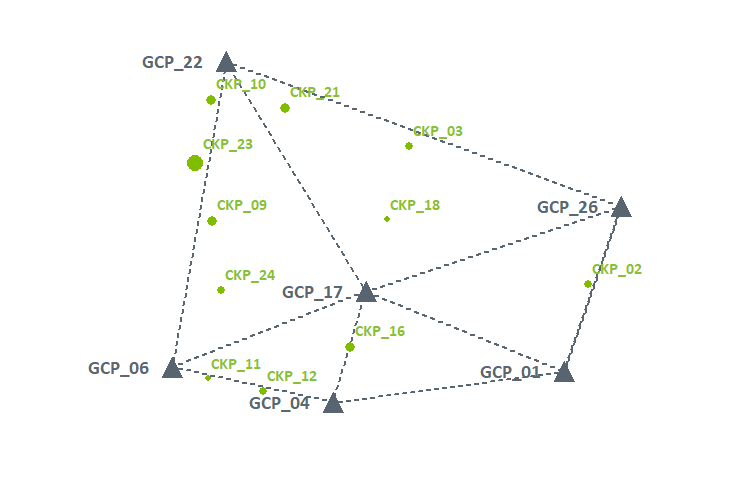
De la tabla, pudimos ver que colocando un GCP más en el medio del campo, la precisión vertical mejoró de 65 cm a alrededor de 6,6 cm. El error se acumula cuando se aleja de los GCP y cuando hay una región difícil alrededor.
“Una región difícil” aquí se refiere a casos que podrían ser problemáticos para la búsqueda de características y la coincidencia de imágenes, y los campos de cultivo es uno de ellos. Las imágenes tomadas de tales regiones generan más errores de posición que conducen a una menor precisión. En este caso, las posiciones precisas de la cámara (99% RTK-fixed en la primera etapa) funcionan como GCPs densos y bien distribuidos.
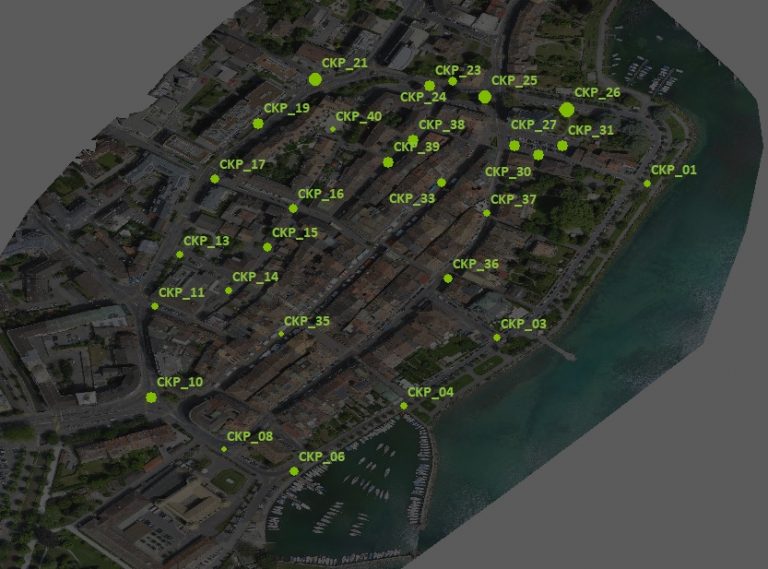
Vuelo urbano
Doble grilla, altura = 102 m (GSD 2.5 cm), superposición 80%
Volar un avión no tripulado de ala fija sobre un área urbana podría ser más complicado. Además de los problemas de permisos, necesita un lugar abierto para el despegue y el aterrizaje, que no siempre es factible para las regiones urbanas.

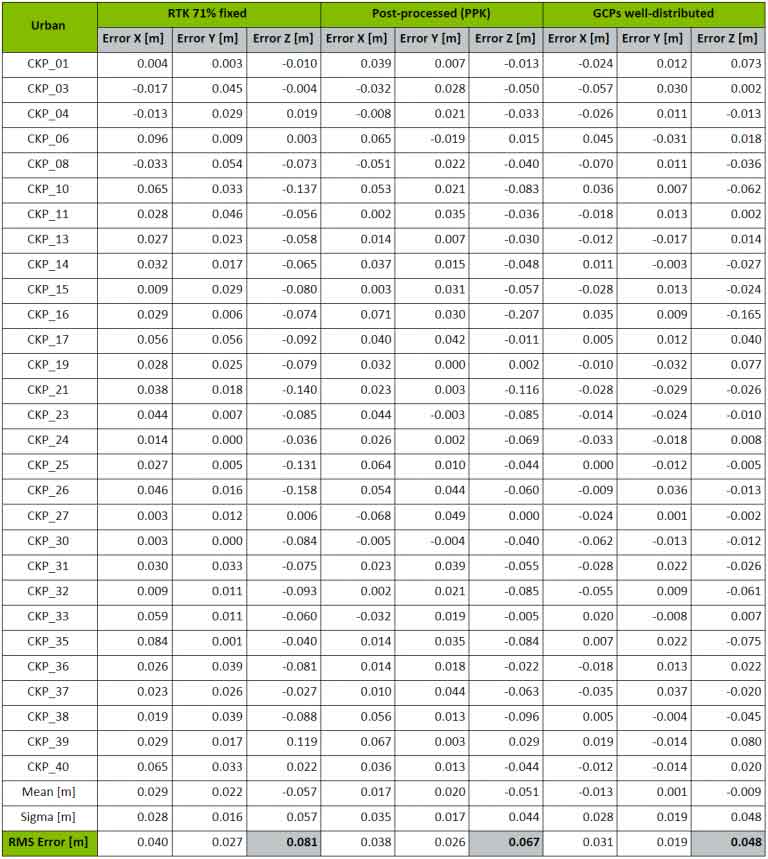
En este proyecto, encontramos un espacioso parque deportivo cerca del centro de la ciudad. Los edificios, los árboles y el Wi-Fi local interfirieron las conexiones de enlace de datos durante el vuelo. Resultó que solo el 71% de las posiciones de la cámara estaban bien corregidas (RTK-fixed).
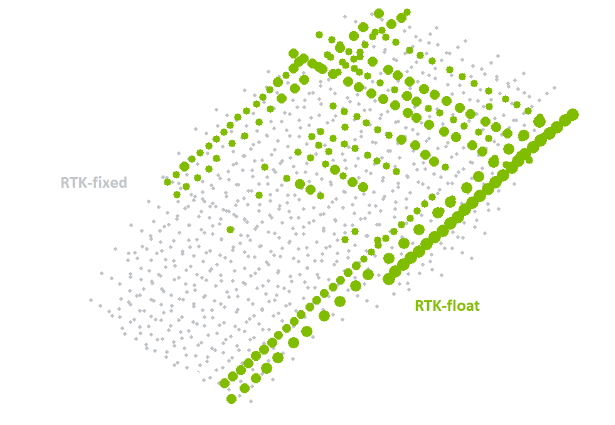
En situaciones reales, la distribución desigual de RTK-float (posiciones no bien corregidas) causó una barrera al mejorar la precisión global.
A partir de los resultados, notamos la desventaja del vuelo RTK cuando la conexión se perdió debido a las obstrucciones. En tales condiciones, PPK mejora el resultado. Aunque no se garantiza que sea siempre mejor que usar GCP, en nuestro caso son bastante similares.
En el vuelo RTK, encontramos errores más grandes cerca de donde se ubicaron las posiciones de la cámara flotante RTK, mientras que en los resultados postprocesados, el error parece más uniforme en toda la región.
La herramienta indicada para tu proyecto
Para campos o lugares, ya sean planos o con grandes relieves, donde las conexiones de enlace de datos son estables y sin obstáculos, el vuelo RTK puede describir el terreno muy bien y proporciona resultados extremadamente precisos sin utilizar ningún GCP.
El mapeo con un dron RTK / PPK es especialmente ventajoso cuando hay vegetación densa, cultivos o algunas características difíciles de igualar en el contenido de la imagen. Siempre mantienes las salidas de alta precisión y calidad bajo control, ignoras dónde colocas o puedes poner tus GCP.


En las regiones urbanas, puede haber una diferencia. Si bien en ciertas partes puede perder conexiones que terminan distribuyendo de manera desigual las posiciones de la cámara flotante RTK, puede que le resulte difícil mejorar la precisión general. En nuestro caso, PPK ofrece mejores resultados que el vuelo RTK, aunque ninguno proporciona una precisión mayor que la procesada con GCP bien distribuidos.
Ahora hemos visto la calidad de salida de ambas soluciones. Sin embargo, hay cosas que también debemos tener en cuenta: La viabilidad, el tiempo, el costo y el lugar donde se encuentra.
No siempre es factible medir los GCP debido a muchas razones en el sitio, como texturas de terreno frágiles, lugares inalcanzables y otras preocupaciones de seguridad personal. Además, la planificación y la medición de los GCP pueden tardar horas cada vez, mientras que el procesamiento posterior normalmente toma solo de 10 a 20 minutos. En cuanto a los gastos, la medición de los GCP es un gasto que se gasta en cada área del proyecto, a diferencia de una carga única de comprar un dron RTK / PPK. Teniendo en cuenta para un plazo más largo, obtener un dron RTK / PPK parece ser una mejor inversión.
¿Listo para obtener un dron RTK / PPK? No olvides verificar si tienes acceso a la estación base local o a la red VRS si eliges la solución RTK / PPK. De lo contrario, aún necesitarías medir tus propias estaciones base.
Agradecimiento especial
Gracias a todos los que donaron equipo o tiempo
| senseFly | drone ebee Plus |
| EPFL TOPO lab | Javad Triumph RTK |
| Adquisición de datos | Dai Shi, Lisa Chen |


