Interview: Drohnen in der Landwirtschaft
Ein Interview mit Jan-Philip Pohl (AGRARPOHL), Dr. Andreas Muskolus (IASP) und Florian Mühlschlegel (Pix4D) zum Stand der Drohnen- und Sensortechnologie in der Landwirtschaft
Pix4D testet und entwickelt in Zusammenarbeit mit dem Institut für Agrar- und Stadtökologische Projekte an der Humboldt-Universität zu Berlin (IASP) Remote Sensing Technologie auf der Versuchsanlage Berge, Brandenburg.
Pix4D: Ich begrüße Jan-Philip Pohl, Geschäftsführer der Firma Agrarpohl, Dr. Andreas Muskolus, stellvertretender Geschäftsführer des Institut für Agrar- und Stadtökologische Projekte an der Humboldt-Universität zu Berlin (IASP) und Leiter der landwirtschaftlichen Versuchsstation Berge, sowie meinen Kollegen Florian Mühlschlegel, Account Executive bei Pix4D zu unserem Interview. Bevor wir fachlich loslegen, wie habt ihr die letzten Wochen erlebt? Konntet ihr arbeiten oder wart ihr zur Untätigkeit im Home Office verdammt?
Florian: Also ich habe mich gut ans Home Office gewöhnt. Gerne öfters. Dadurch, dass ich viel mit Email und Videokonferenzen arbeite, hat sich nicht viel verändert. Nur das Treffen der Kollegen im Büro vermisse ich schon.
Jan-Philip: Wir konnten gut weiterarbeiten und mit dem Befliegungsservice fortfahren. Einige Aufträge wurden Corona-bedingt verschoben. Ansonsten wie bei Florian, Emails, Treffen, Kundenkontakte, Videokonferenzen alles komplett digital.
Andreas: Bei uns auf dem Acker konnten wir die Abstandsregeln sehr gut einhalten. Unsere Büros in Berlin dagegen waren stark betroffen. Wir mussten A-B-Teams bilden. Die meisten Kollegen waren im Home Office und überhaupt nicht im Büro. Wir sind gerade in der Phase, zu mehr Präsenzzeit zurückzukehren.
Pix4D: Dann starten wir jetzt mit der ersten fachlichen Frage: Für Drohnen in der Landwirtschaft sehen wir bei Pix4D konkret zwei wichtige Anwendungsgebiete, zum einen beim Einsatz in der Pflanzenproduktion zur Planung von teilflächenspezifischen Anwendungen und zum zweiten im Einsatz im Feldversuchswesen. Welches Anwendungsfeld ist wichtiger und wie denkt ihr, wird sich das zukünftig entwickeln?
Jan-Philip: Momentan ist tatsächlich gemessen an unseren Aufträgen das Versuchswesen stärker vertreten. Ich denke aber, dass sich beide Gebiete parallel deutlich weiterentwickeln werden. So werden im Versuchswesen ständig neue Sensoren und Analysemethoden entwickelt und getestet. Den Bedarf sehen wir aber auch in der Praxis und diese Methoden werden auch dort schnell zur Anwendung kommen.
Andreas: So sehe ich das auch. Die Fragestellungen sind in der Praxis allerdings immer etwas anders. Es geht darum, die Heterogenität auf dem Feld zu managen, Düngung und Pflanzenschutz möglichst teilflächenspezifisch anzuwenden je nachdem, was man mit der Drohne sehen kann. Währenddessen werden im Versuchswesen die Unterschiede ja gewollt herbeigeführt und gemessen. Die Flächen sind kleiner und spezifischer.
Ich denke, viele Neuerungen werden den Weg aus dem Versuchswesen in die Praxis schaffen. Man denke da nur an die Blattgrünmessung oder den Yara N-Sensor.
Pix4D: Was fehlt denn noch, dass diese Transition vom Versuchswesen in der Praxis stattfinden kann?
Jan-Philip: Im Versuchswesen sind wir natürlich auf kleineren Flächen unterwegs. Für den praxistauglichen Einsatz müsste die Flächenleistung der Drohnen weiter gesteigert werden. Die Drohne sehe ich hier nur als Technologieträger. Welcher Sensor dabei transportiert wird, ist nebensächlich. Wir müssen hier auf die nächste Generation der Batterietechnologie mit höherer Energiedichte warten und hoffentlich auch auf Änderungen in der Gesetzgebung, die das Fliegen außerhalb des Sichtbereichs ermöglichen. Trotz alledem sind wir mit den aktuellen Möglichkeiten bei Drohnen für teilflächenspezifische Maßnahmen mit hohen Flächenleistungen bis zu 500 ha am Tag im Praxiseinsatz.
Andreas: Ich sehe das auch eher von der technologischen Seite. Insbesondere wenn es um kleine Details geht, die in der Bonitur eine große Rolle spielen, Details etwa auf der Blattoberfläche, die mit dem Auge noch zu erkennen sind, ist die Verwendung von Drohnen nicht so einfach. Pflanzenkrankheiten bonitiert man häufig bei Auftreten. Es gibt sehr viele Krankheiten mit sehr unterschiedlichen Ausprägungen. Ich würde mir da eine Software wünschen, die lernen kann, welche Struktur gerade bonitiert werden soll und das dann auch schnell ausführt.
Pix4D: Wir haben jetzt Juni. Welche Tests laufen aktuell und welche Boniturparameter werden dabei erhoben?
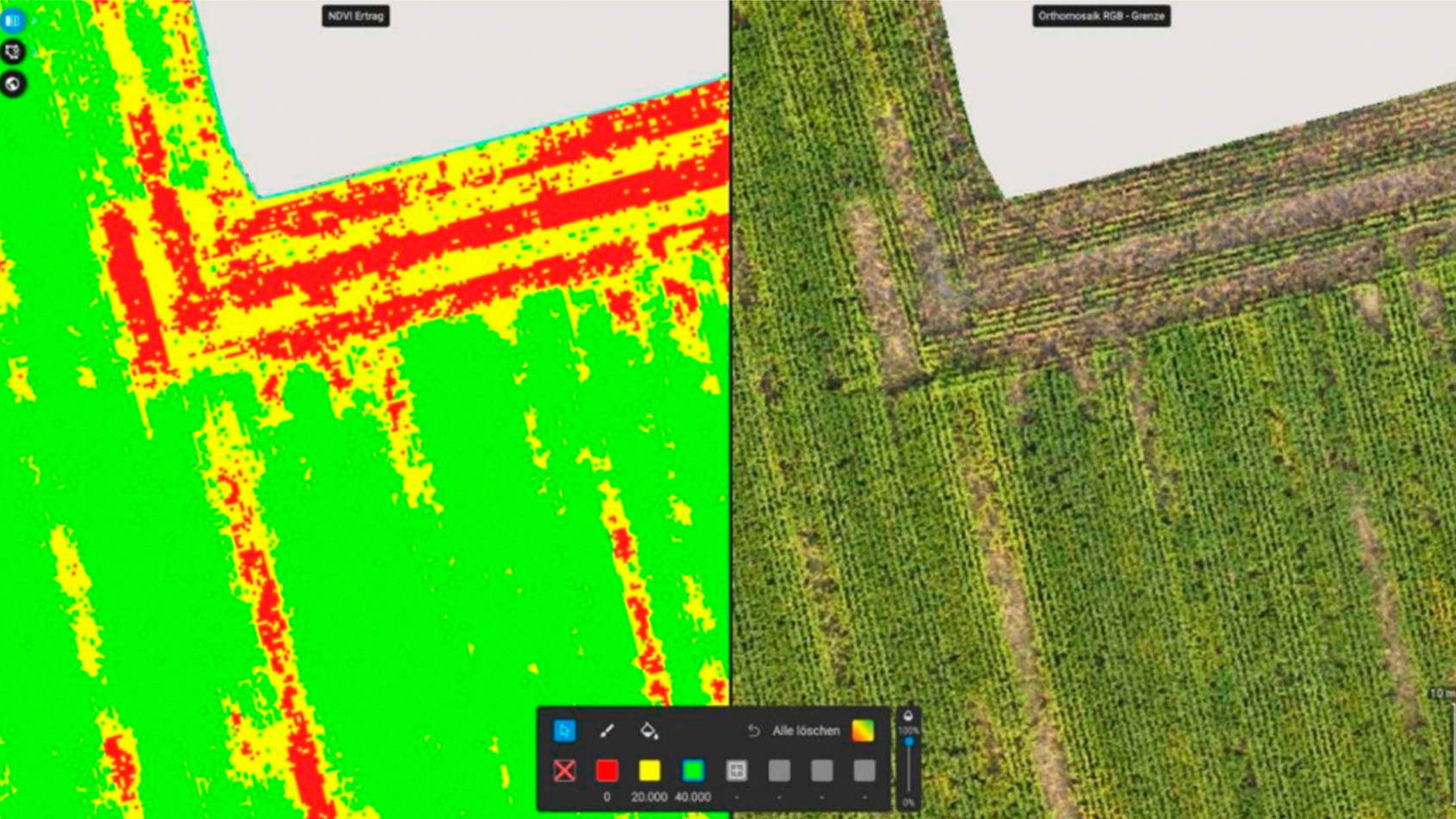
Jan-Philip: Wir haben aktuell mehrere Exakt- und auch Großflächenversuche in Getreide, Mais, Zuckerrübe, aber auch im Gemüsebau in verschiedenen Kulturen vom Broccoli bis zum Eisbergsalat zu befliegen. Dabei werden Indexwerte abgefragt, insbesondere der NDVI für die Biomasse, aber auch Pflanzenhöhe, Verfärbungen, Korrelationen mit dem Nährstoffgehalten und insbesondere im Versuchswesen Pflanzenzählungen.
Andreas: Aktuell reifen die ersten Winterungen ab. Bei Raps und Gerste ist die Wuchshöhe entscheidend. Auch wird bonitiert, ob Lager auftritt. Beim Weizen sind es die ersten weißen Ähren, die ein Maß dafür sind, welche Halmkrankheiten im Bestand sind. Das nennt man Weißährigkeit. Und bei den Sommerungen geht es um die Anzahl der Pflanzen, Spektren, Verfärbungen und Indexwerte.
Pix4D: Apropos Zählen. Verwendet man Drohnen, benötigt man zunächst geeignete hochaufgelöste Orthomosaiks. Auf was genau ist da in der Praxis zu achten? Wie erzeugt man solche Karten in der Praxis?
Florian: Es kommt darauf an, welche Art von Objekte man zählen möchte. Danach richtet sich die Orthomosaikauflösung. Bei Objekten mit wenigen Zentimetern Auflösung, wie etwa jungen Pflanzen benötigt man schon Bodenauflösungen von weit unter 1 cm pro Pixel. Bei Bäumen im Forstbestand genügen sicher auch Auflösung ab 10 cm pro Pixel.
Jan-Philip: Kameraauflösung und Flughöhe bestimmen dann die Bodenauflösung…
Pix4D:… auch Ground Sample Distance / GSD genannt …
Jan-Philip: … genau. Wir verwenden RGB-Kameras und Multispektralkameras. Die GSD liegt dabei bei 0,5 - 5 cm pro Pixel. Dann ist noch sehr wichtig, dass wir einen Weißabgleich durchführen und die Lichtverhältnisse bei der Befliegung möglichst konstant bleiben. Insbesondere bei sehr hoch aufgelösten Orthomosaiks ist die korrekte Georeferenzierung des Bildes wichtig.

Pix4D: Welche Georeferenzierungsvarianten verwendet ihr?
Jan-Philip: Wir verwenden ein RTK-System auf der Drohne. Es können auch Bodenkontrollpunkte auslegt werden, die mittels RTK eingemessen werden. Viel Arbeit wird durch das RTK-System auf der Drohne erspart, so dass wir das häufiger verwenden.
Pix4D: Wie zählt ihr? Manuell oder automatisch?
Jan-Philip: Wir zählen automatisiert über einen Index mit einem Algorithmus. Der Index klassifiziert in Form und Farbe. Solche Tools sind verfügbar zum Beispiel in QGIS. Jede so über den Index klassifizierte Pflanze kann in ein Polygon umgewandelt werden. Die Mittelpunkte der Polygone lassen sich dann recht einfach automatisch durchzählen.
Andreas: Wir zählen manuell. Jan-Philip, funktioniert das dann auch bei Ähren oder nur bei Pflanzen, die vom Boden umgeben sind und sich dadurch visuell von der Umgebung abheben?
Jan-Philip: Das ist möglich, aber schwierig. Ich würde den Ball da doch zu Pix4D spielen. Was man hier benötigt, ist eine intelligente Softwarelösung.
Andreas: Insbesondere wenn sich die Form der Ähren in den Pflanzentypen, im Entwicklungsstadium, in Reifegrad, sogar bei den Sorten stark unterscheiden. Man bräuchte ein Softwaresystem, das schnell lernt und auf die unterschiedlichen Ährenformen trainiert wird.
Pix4D: Kommen wir nochmal zurück zum Thema der RTK-Systeme. Wenn man nun Daten zeitlich miteinander vergleichen möchte und Pixelwerte genau übereinander liegen müssen, damit sie verglichen werden können oder auch bei der Verwendung von Daten auf Traktoren mit RTK-Lenksystemen, ist die genaue Georeferenzierung der Daten eine wesentliche Voraussetzung. Wie genau ist denn dann ein RTK-System in der Befliegungspraxis? Worauf muss man dabei achten?
Florian: Die Verwendung von RTK-Systemen hängt immer von den Anforderungen ab. Sofern eine absolute Genauigkeit, sprich Position auf der Erde, von 1-2 cm nicht erforderlich ist, genügen häufig auch GNSS-Systeme, wie GPS, Glonass, Beidou oder Galileo. Das ist auch eine Kostenfrage. So sind im Feldversuchswesen RTK-Systeme oder die Verwendung von Passpunkten notwendig. Bei der Erstellung von Anwendungskarten für eine teilflächenspezifische Maßnahme kann man aber darauf verzichten.
Jan-Philip: Genau. Wenn eine Feldspritze einen Arbeitsradius von 36 m abdeckt, genügt die Genauigkeit der übliche GNSS-System preiswerter Drohnen. In der Praxis funktioniert übrigens häufig auch sehr gut die Georeferenzierung über feste Landschaftspunkte, wie etwa Gullideckel, Bäume oder Sträucher. Am Ende des Tages ist es eine Preisfrage für den Kunden oder Anwender.
Pix4D: Gibt es Unterschiede zu beachten in der Verwendung von Multispektral- oder RGB-Kameras in Zusammenhang mit RTK-Systemen.
Jan-Philip: Nein. Die RTK-korrigierte Position wird auf der Drohne an die Kamera weitergegeben. Multi- oder auch Hyperspektraldaten werden auf diese Art genauso gut georeferenziert wie RGB-Bilder.
Florian: Aus Sicht der Photogrammetrie ist hier wesentlich, dass es sich bei Multispektralkameras um sogenannte Rigsysteme handelt, d.h. diese bestehen aus mehreren Kamerasensoren welche die unterschiedlichsten Wellenlängen bereiche abdecken aber aufgrund des Aufbaus als ein einzelner Sensor behandelt werden können. Um gute Berechnungsergebnisse zu bekommen, müssen die einzelnen Sensoren zeitgleich auslösen und die Bilder korrekt georeferenziert sein. Ist das nicht der Fall, kann es zu Bildartefakten, Versatz oder Vignetting-Effekten in der Verarbeitung kommen. Wir bei Pix4D unterstützen die meisten kommerziellen RGB- und Multispektralkameras in unseren Produkten Pix4Dmapper, Pix4Dfields und Pix4Dengine.
Hyperspektralsensoren, in Kombination mit einer Drohne, sind aktuell in der Praxis noch nicht sehr verbreitet. Ich denke aber, dass diese Technologie großes Potenzial hat, Pflanzenerkrankungen frühzeitig festzustellen, indem Spektraldaten mit Datenbanken typischer Krankheitsspektren korreliert werden.
Andreas: Solche Ansätze gibt es, allerdings noch im frühen Entwicklungsstadium. Aus der praktischen Anwendung sind mir solche Systeme noch nicht bekannt.
Jan-Philip: Wir selbst haben noch keine drohnengestützten Hyperspektralsensoren getestet, lediglich stationäre. Die meisten Hyperspektralsensoren sind ja auch Zeilenscanner. Das heisst, der Copter muss sehr lange an einer Stelle in der Luft stehen, um gute Ergebnisse zu bekommen. Ich denke, da muss ich doch noch einiges technologisch tun, um praxistauglich für die Fläche zu werden.
Pix4D: Was kann ich denn aus solchen Multispektraldaten lesen?
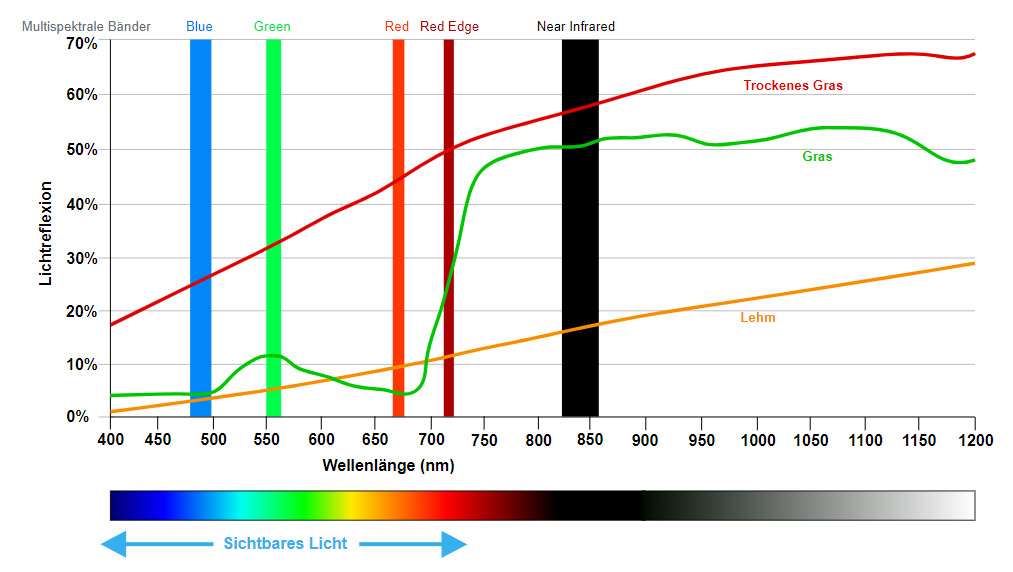
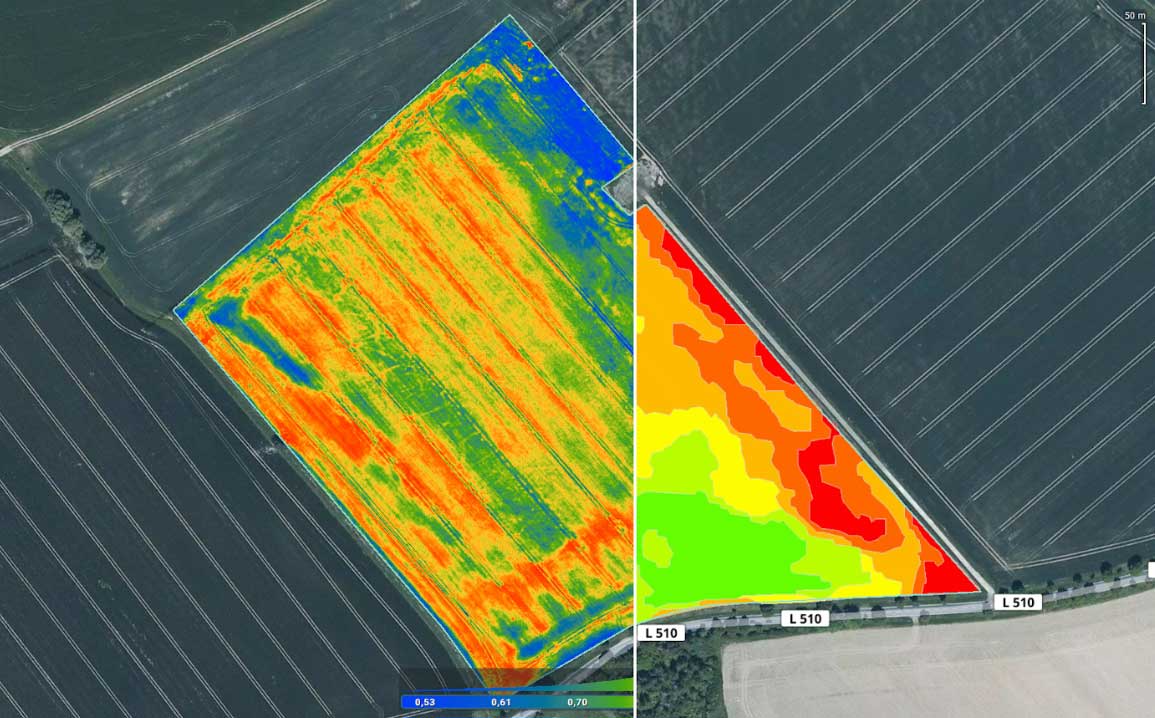
Andreas: Multispektraldaten geben Aufschluss über den Ernährungs- und Entwicklungszustand der Pflanzen sowie über Stressfaktoren. Multispektraldaten zeigen das Reflexionsspektrum der Pflanzen im Sonnenlicht. Chlorophyll absorbiert vor allem blaues und rotes Licht, so dass das Reflexionsspektrum hier verglichen mit dem grünen oder dem infraroten Bereich geringere Werte zeigt. Die Biomasse kann abgeschätzt werden, indem die schmalen Spektralbänder für Blue, Green, Red, Red Edge, Near Infrared des Reflexionsspektrums zu Indexkarten, etwa NDVI verrechnet werden.
Spektren erkrankter Pflanzen sind charakteristisch und unterscheiden sich in den Krankheiten, Pflanzentyp, Entwicklungsstadium. Hyperspektraltechnologie in Kombination mit guten Hyperspektraldatenbanken hat hier extrem viel Potential für die frühzeitige Erkennung von Krankheitsbefall.
Jan-Philip: Wir haben bisher sehr gute Erfahrung gemacht in der Erkennung der Ausbreitung von Phytophthorain in Kartoffeln oder Cercospora in Zuckerrüben. Je nach Witterungen sind diese Krankheiten sehr aggressiv. Wir konnten über Drohnenmonitoring sehr schnell Ort, Ausbreitung und Grad der Schädigung feststellen.
Pix4D: Zurück zu den Softwarewerkzeugen. Welche Tools setzt man in der Fernerkundung ein?
Jan-Philip: Als erstes benötigt man ein Orthomosaik. Die Einzelbilder werden automatisch von der Drohne aufgenommen. Pix4Dmapper, Pix4Dfields oder auch Metashape können verwendet werden, um daraus eine zusammengesetzte Karte, ein Orthomosaik zu erzeugen. Wir exportieren diese Karten dann in ein GIS-Tool. Das kann ArcGIS sein oder Open Source Software wie etwa QGIS, um Parzellen und Schläge zu bearbeiten.
Dann kommt die dritte Komponente ins Spiel - die Analyse. Abhängig von der Aufgabe verwenden wir hier eine ganze Palette von Softwarelösungen aus den Bereichen Photogrammetrie, GIS oder Python-Bibliotheken. Exportiert werden die Daten dann in ISO-XML, Shapefiles und Excel.
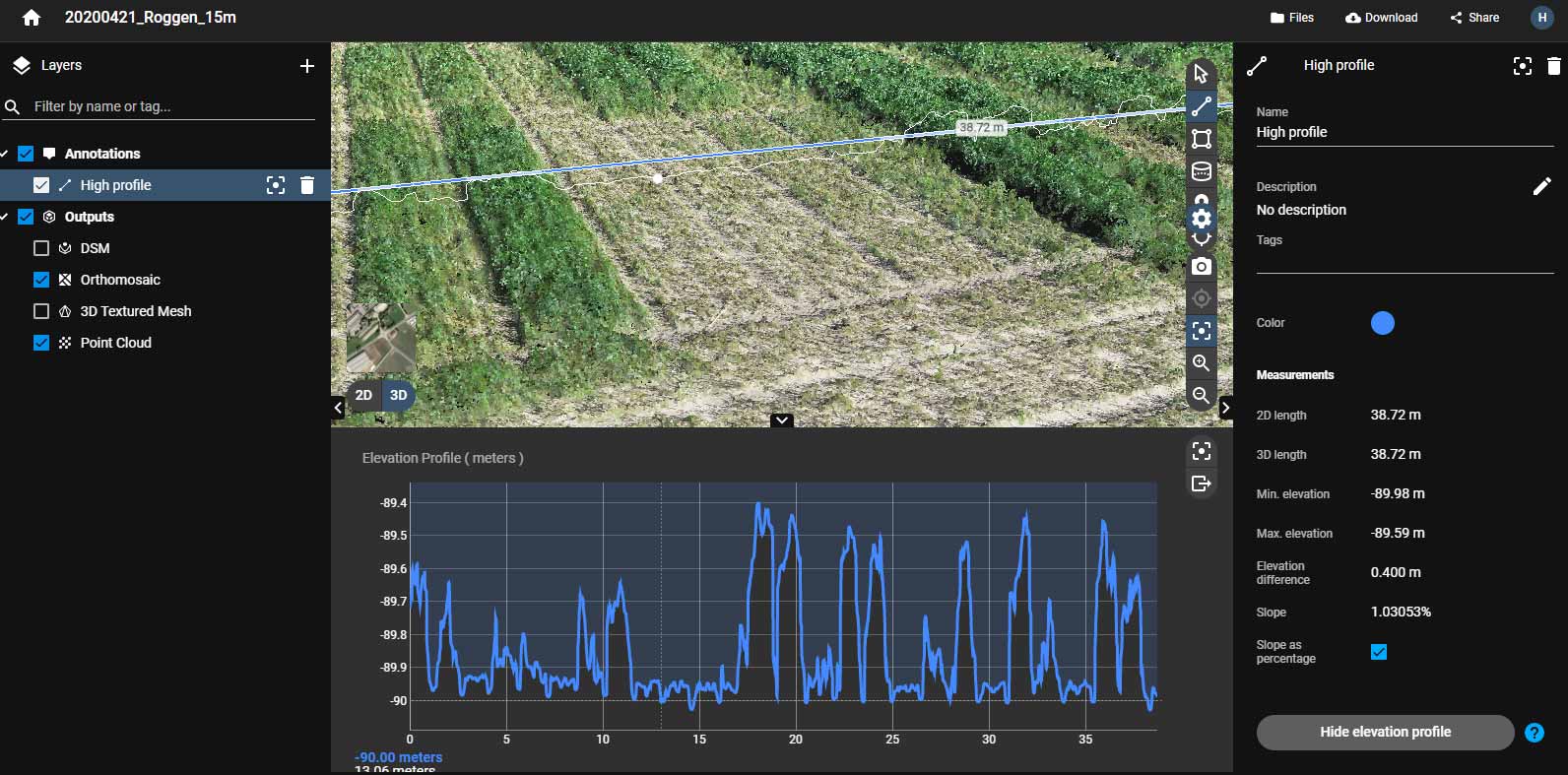
Pix4D: Wie wichtig ist eigentlich die Erfassung der Bewuchshöhe in der Bonitur? Wie häufig werden diese Daten erhoben? Und welche Genauigkeiten brauche ich hierfür?
Andreas: In Sortenversuchen ist das ein Parameter, der einmal im Jahr erfasst wird. In Versuchen zu Krankheiten oder Nährstoffen auch viel häufiger.
Pix4D: Wie läuft das aktuell in der Praxis ab?
Andreas: Mit dem Meßstab und zufällig ausgewählten Pflanzen. Daraus wird ein Mittelwert gebildet. Wir erreichen Genauigkeiten von +/- 5 cm.
Jan-Philip: Auf einigen Versuchsstationen kommen auch stationäre Laserscanner zum Einsatz. Einen Laserscanner hatten wir auch schon auf eine Drohne montiert und getestet.
Andreas: Leica-Laserscanner haben wir ebenfalls schon verwendet, aber festgestellt, dass die Nachbearbeitung recht aufwendig ist.
Pix4D: Wenn Ihr nun einen Wunsch frei hättet in bezug auf Digitalisierung und Software, was wäre das?
Florian: Ich würde mir wünschen, dass die Multispektraldaten der Drohne mit anderen bereits vorhandenen Datenbeständen vergleichen und verarbeiten zu können. Ich glaube, dass sich aus dieser Datenfusion Informationen ergeben, die der Drohnentechnologie in der Landwirtschaft und der teilflächenspezifischen Bewirtschaftung zum Durchbruch verhelfen können.
Andreas: Für mich aus der Sicht der Wissenschaft ist ein sehr aktuelles Gebiet der Ausstoß von klimarelevanten Gasen in der Landwirtschaft. Lachgas und Methanmessungen sind sehr aufwendig. Ich würde mir wünschen, diese Messungen mit einer Drohne durchzuführen.
Jan-Philip: Wir wollen in der Landwirtschaft nachhaltiger werden und wünsche mir ebenfalls praxistauglichen Technologie und frei zugänglichen Daten, die letztendlich zu einer ressourcenschonenden Pflanzenproduktion führen.
Pix4D: Andreas, Jan-Philip, Florian, ich bedanke mich für das Gespräch.
Kontakte: Dr. Andreas Muskolus Institut für Agrar- und Stadtökologische Projekte an der Humboldt-Universität zu Berlin (IASP), andreas.muskolus@iasp.hu-berlin.de
Florian Mühlschlegel Pix4D, florian.muehlschlegel@pix4d.com
Jan-Philip Pohl AGRARPOHL, info@agrarpohl.de