RTK vs PPK drones vs GCPs: which provides better results?
Last updated: January 31 2022
Accuracy is of vital importance for drone mapping, photogrammetry, and aerial surveying professionals. But with so many methods out there, it's not always clear which one is the best.
We've tested RTK vs non-RTK drones in different, real-world conditions to help you understand which is the best tool for you.
What is the difference between RTK and PPK drones?
The main difference between the two is when the positional corrections take place. RTK corrects during the flight, and PPK corrects afterwards.
Non-RTK drones - are they accurate?
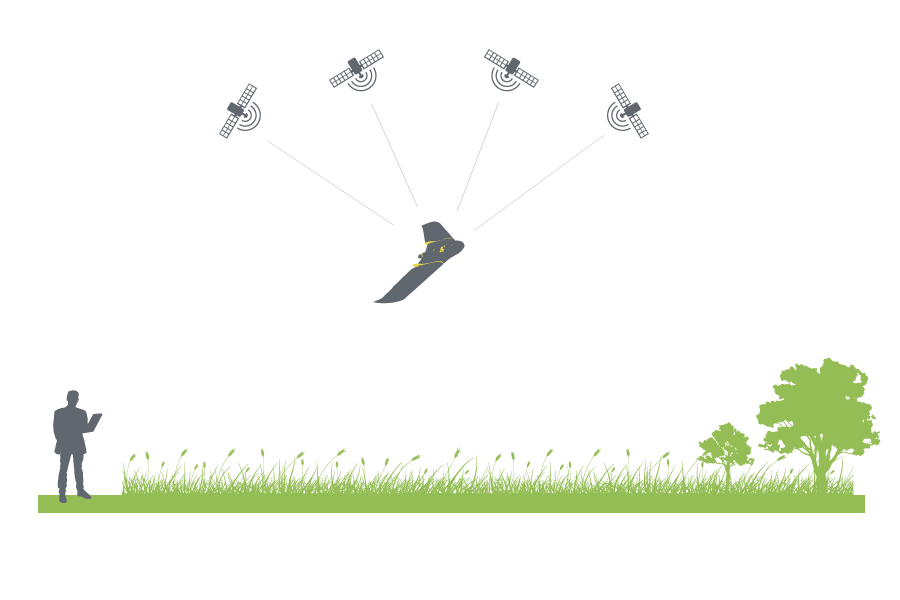
When you fly a non-RTK drone with an onboard GPS receiver or a receiver along with the camera, camera positions are trilaterated from satellites so their positions are identified by several distance measurements.
Normally, you can expect an inaccuracy of up to several meters, especially in Z directions, depending on the equipment quality and the satellite geometry.
• Improve the accuracy of your drone mapping projects
What is GNSS and what is GPS?
A Global Navigation Satellite System (GNSS) is a network of satellites broadcasting timing and orbital information used for navigation and positioning measurements. A GNSS uses constellations of satellites and is based on the concept of trilateration. In short, GNSS receivers accurately determine their own location by measuring the distance to three or more satellites.
Some examples of GNSS include Galileo GPS, GLONASS, and BeiDou.
Global Positioning System (GPS) is a type of GNSS that was developed by the US Department of Defense for military use back in the 1970s, but was later made accessible to civilians as well. GPS is now the most widely used GNSS in the world, and provides continuous positioning and timing information globally.
What is RTK technology and how does it work?
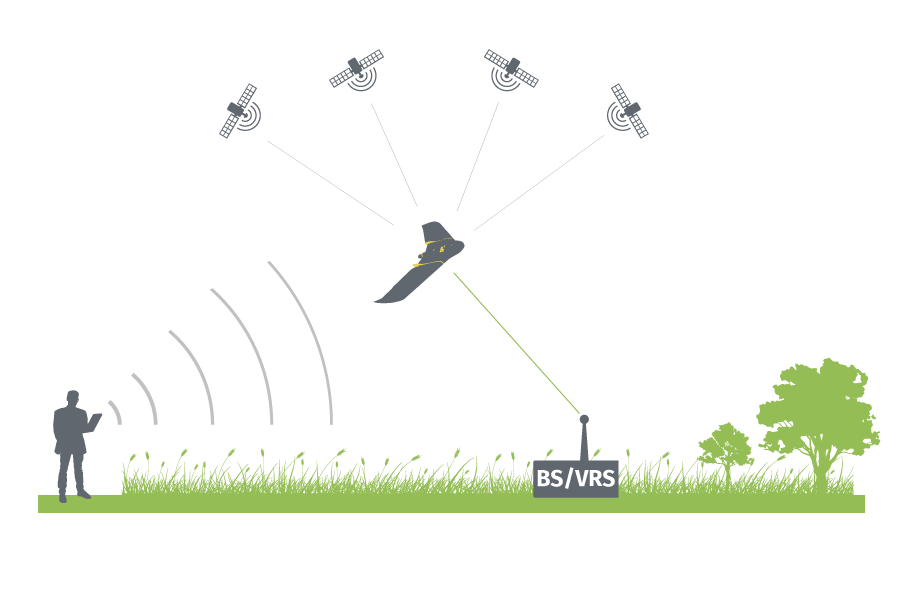
An RTK drone carries an onboard GNSS RTK receiver that gathers data from satellites, and a base station, to more accurately correct image location in real time as it flies. Due to these connections, RTK positioning can have its downsides, such as radio link outages and signal blocks. The long distances between the drone and the base station can cause the signals to be obstructed, resulting in the loss of correction data and a lower percentage of accurate camera positions in the flight.
With a data-link connection, such as GSM or Wi-Fi, an RTK drone will connect to a base station or a virtual reference station (VRS) via the laptop or device in control of the flight. The camera positions are calculated in real-time, referring to ground references, the locations of which are accurately measured for a long period of time. The calculations help correct the camera positions up to two or three centimetres of accuracy, both horizontal and vertical.
Advantages of RTK
- No need to spend time placing GCPs in places that are difficult to access
- No need for after flight GNSS post-processing
- Real-time corrections are made using the real time GPS positioning of the drone
- Better waypoint navigation, useful for challenging environments
- Autonomous assisted landing with the RTK
- No post-processing software package is required for real-time operation
However, things do not always work perfectly. People working on-site may encounter interrupted connections which interfere with the real-time corrections for the camera positions. The system gives float solutions or even goes back to standalone mode. The camera positions are RTK-float, indicating uncertainty around the corrections. The accuracy will again be off by tens of centimetres for RTK-float, or even meters away, as you would get from non-RTK flights. In this case, you can perform PPK corrections as long as your drone provider does so. For this reason it would be beneficial to use GCPs.
What is a PPK drone and how does it work?
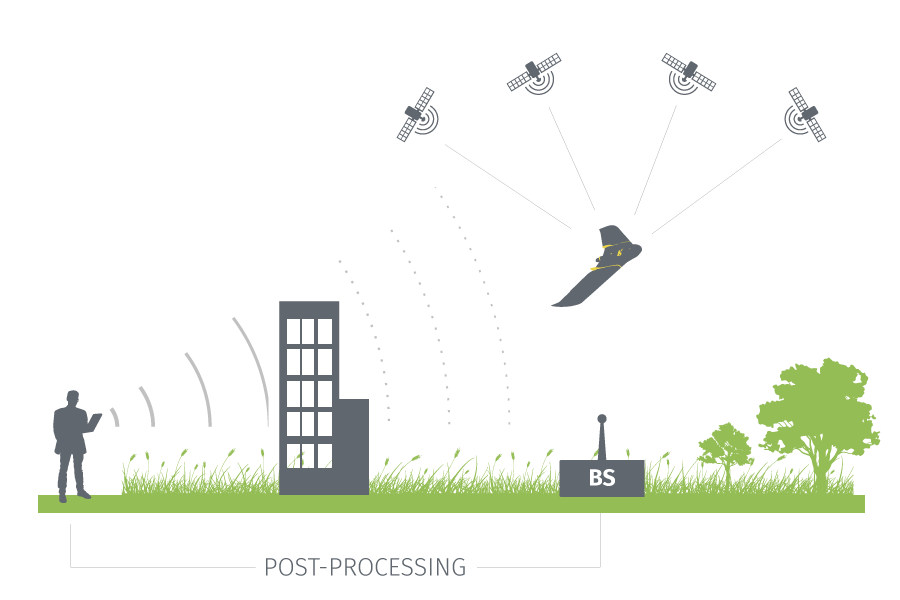
PPK stands for “Post-Processing Kinematic.” In a PPK workflow, the drone attaches geocoordinates to each image based on an onboard GNSS receiver. Also during flight, a base unit (which could be a GNSS base station, or CORS network) also records positional information with more accurate triangulation.
Advantages of PPK
- No need to spend time placing GCPs in places that are difficult to access
- More complete data due to not relying on a constant data connection
- Greater flight flexibility in environments where interruptions to the real-time correction can occur
- Retention of GNSS data to prove accountability and reprocess if required
- Save time on site, as no RTK connection is required to be established
- Flexibility in using base-stations
- No need for long-range radio or risking datalink dropouts
- Accurate GNSS positioning for the drone after the flight
- Ability to process with GPS only or GPS/IMU in forward-backward smoothing
- Dual-antenna GPS processing support
- Lower cost, because you do not need equipment for measuring GCPs and also save time by not needing to place them
What about ground control points?
Which provides you a better accuracy? RTK, PPK, or GCPs?
There is an advantage to using RTK/PPK drones over non-RTK ones if you do not plan to apply any ground control points (GCPs) due to some on-site limitation or the painful measuring procedures.
However, an RTK/PPK drone needs to pair with specific hardware and software. The whole system needs to support the communication with base stations or VRS and includes post-processing features. All of these high-tech implementations make the RTK/PPK drones much more expensive than others. It is also crucial to have compatible image processing software, such as PIX4Dmapper, which takes into account different accuracies of individual camera positions.
Of course, you can add RTK/PPK to an existing drone, which is an increasingly popular choice. In this article we provide quality comparisons between RTK/PPK flights with no GCP used and non-RTK flights with well-distributed GCPs. The article can serve as a prerequisite or a reference for those who are deciding whether to buy a new drone or to stay with GCPs.
To better investigate the performance, we did two separate flights: one with RTK mode and the other with standalone mode (real-time corrections disabled or connection lost during flight) over two different types of regions: crop fields and urban areas.


Flights were performed with a senseFly eBee Plus and GCPs measured with Javad Triumph-ls. Both RTK flights and standalone flights of the same region followed the same configurations. We used GCPs to adjust the camera positions of standalone-mode flights, and the same set of check points to assess the accuracy of both modes.
All projects were processed with PIX4Dmapper, using the default 3D Map template.
The first test: field flight
Single grid, height = 102 m (GSD 2.5 cm), overlap 80%
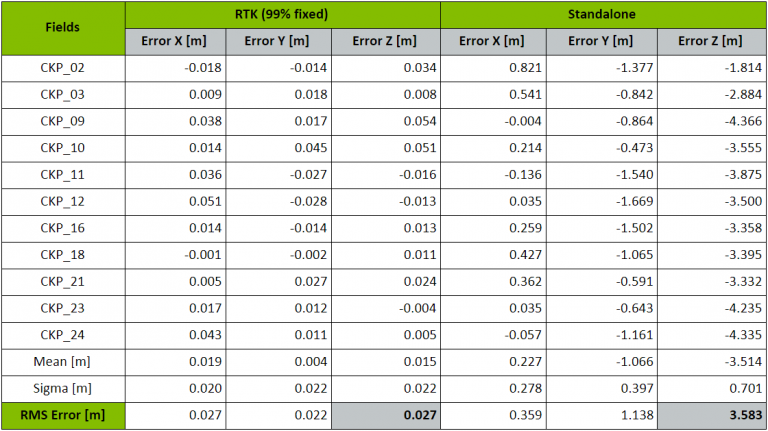
While flying over a field, we can expect that the connection will not meet too many obstructions. Our RTK flight has 99% of the camera positions fixed so clearly, no post-processing (PPK) is needed.
Here we compare the accuracy from the RTK flight without using any GCPs and the standalone-mode flight with well-distributed GCPs. The result from the RTK flight in the field is quite impressive.
It gives around one-pixel (2.5 cm) accuracy in all directions: X, Y, and Z. In standalone mode, we get 3.6 meters of vertical accuracy, which can be expected without applying position corrections or using any GCPs.
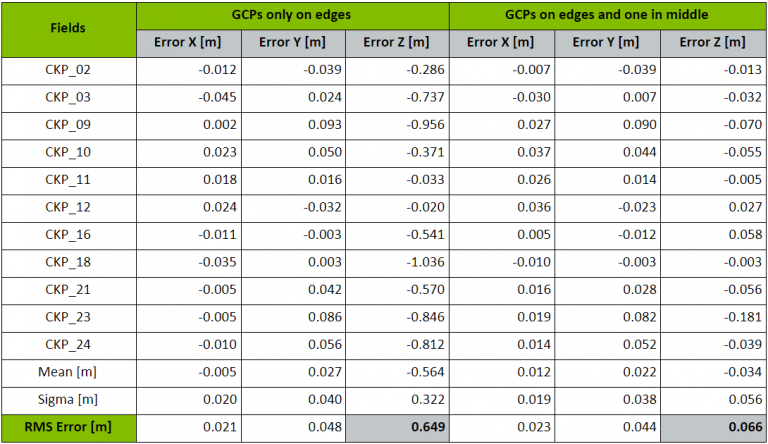
Once we applied a set of GCPs, the errors in Z greatly decreased. However, we also found that the distribution plays an extremely important role in this type of project. Here we also compare the accuracy when using GCPs in different allocation:
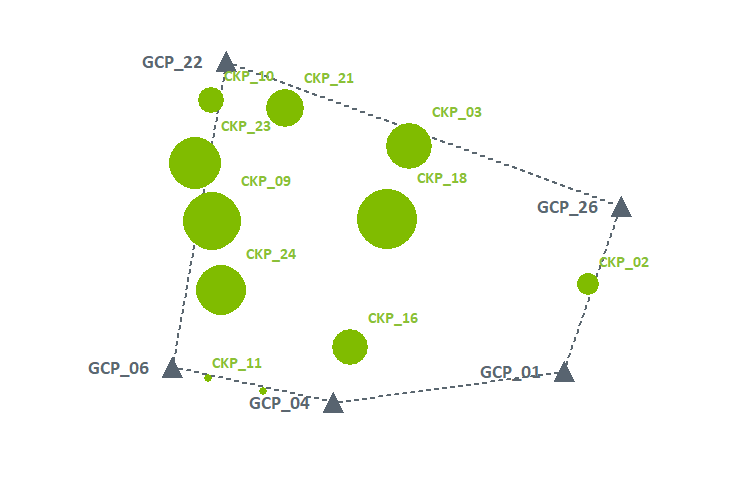
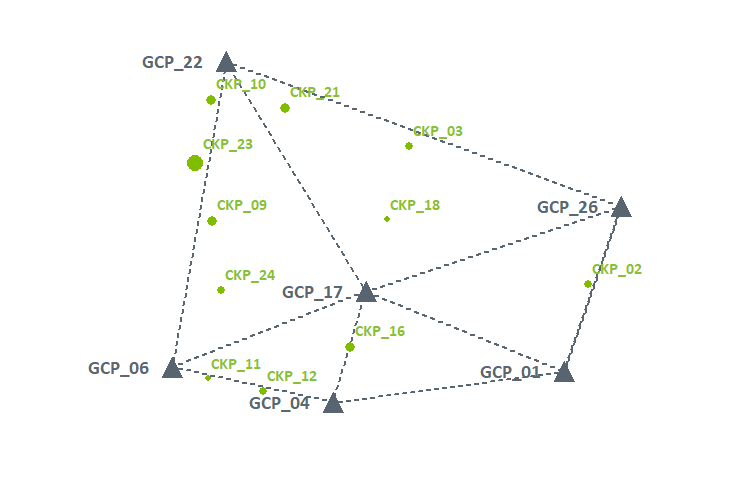
From the chart, we could see that by placing one additional GCP in the middle of the field, the vertical accuracy improved from 65 cm to around 6.6 cm. The error accumulates when it gets further from the GCPs and when there is varied terrain around that may include obstructions - a difficult region.
“A difficult region” here refers to cases that could be problematic for feature finding and image matching, and crop fields is one of them. Images taken from such regions generate more positional errors which lead to lower accuracy. In this case, the precise camera positions (99% RTK-fixed at the first stage) functions as dense and well-distributed GCPs.
Urban flight
Double grid, height = 102 m (GSD 2.5 cm), overlap 80%
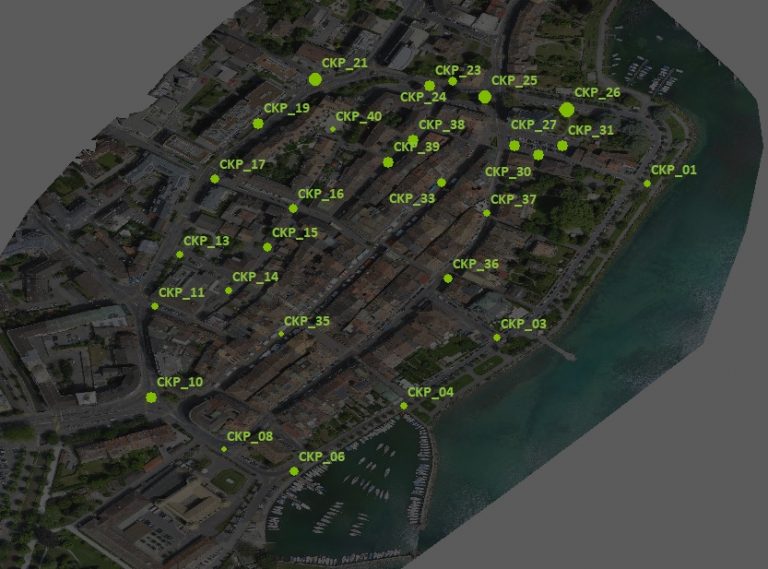
Flying a fixed-wing drone over an urban area can be more complicated. Apart from the permission issues, you need an open place for take-off and landing, which is not always feasible for urban regions.

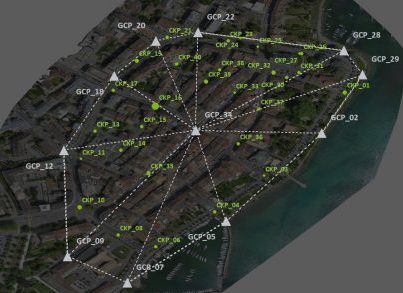
In this project, we found a spacious sports park close to the city center. The buildings, trees, and local Wi-Fi interfered the data-link connections during the flight. It turned out that only 71% of the camera positions were well-corrected (RTK-fixed).
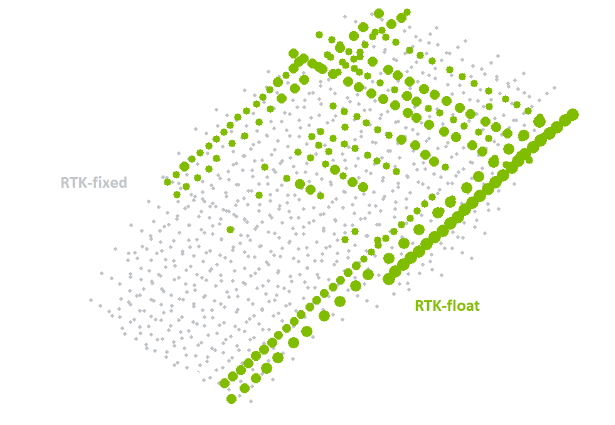
In real situations, the uneven distribution of RTK-float (positions not well-corrected) causes a barrier to improving the global accuracy.
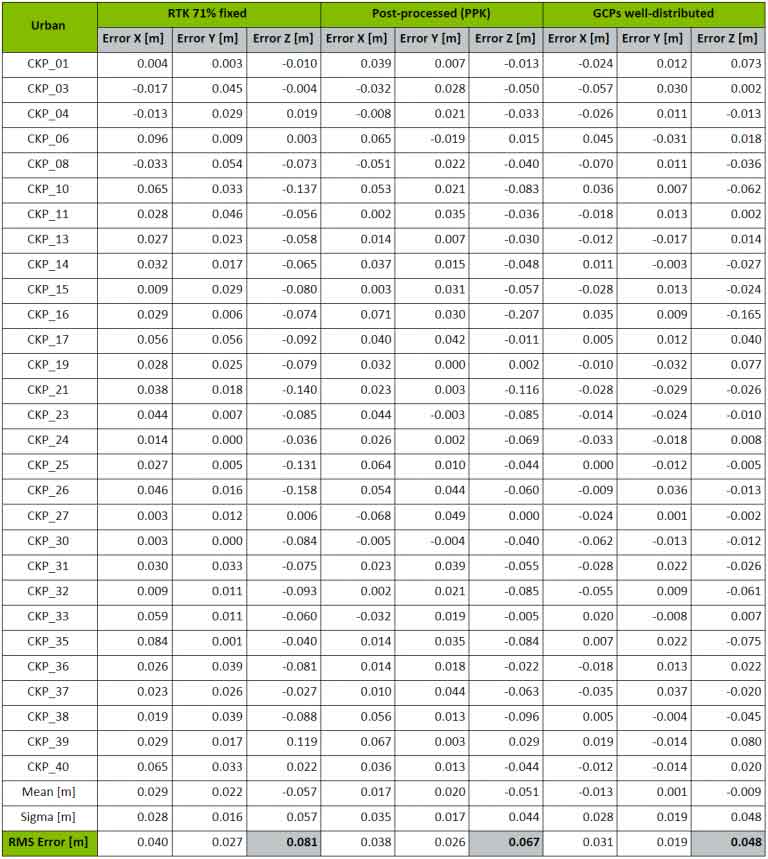
From the results, we noticed the disadvantage of the RTK flight when the connection was lost due to the obstructions. In such conditions, PPK improves the result. Although it is not guaranteed to always be better than using GCPs, they are quite close in our use case.
In the RTK flight, we found larger errors closer to where the RTK-float camera positions were located, while in the post-processed results, the errors looked more even throughout the entire region.
So who wins the PPK vs RTK vs GCPs match?
For fields or places (either flat or with large relief) where the data-link connections are stable and free from obstructions, the RTK flight can capture the terrain very well and gives extremely accurate results without using any GCPs.
Mapping with an RTK/PPK drone is especially advantageous when there is dense vegetation, crops, or some difficult-to-match features in image content. You always keep the high accuracy and quality outputs in control, regardless where you set or are able to set your GCPs.
Addittionaly, the PPK method is ideal for longer flights, especially BVLOS (Beyond Visual Line Of Sight) missions.


In urban regions, it works differently. In certain parts you may lose connections, which will lead to uneven distribution of RTK-float camera positions, and that makes it difficult to improve the overall accuracy. In our case, PPK provided better results than the RTK flight. Neither one though, provides better accuracy than the one processed with well-distributed GCPs.
Now we have seen the output quality of both solutions. However, there are things we also need to keep in mind: the feasibility, the time, the cost, and the type of the area that you want to reconstruct.
It is not always feasible to measure GCPs due to many reasons on site, such as fragile terrain textures, unreachable spots, and other personal safety concerns. In addition, the planning and measurement of GCPs can take hours each time, while the post processing normally takes only 10 to 20 minutes. As for expense, the measurement of GCPs is a cost you must bear for every project area, unlike the one-time-charge of buying a RTK/PPK drone.
Have in mind though, that you are still saving a lot of time when working with PPK and checkpoints as opposed to working with GCPs. You may need to set just 1 checkpoint on the entire job site as opposed to 5 to 8 GCPs, in order to evaluate the accuracy of your project.
Considering the above, it’s important to note that GCPs are still part of drone mapping, as they allow the survey drone to produce an accurate quality report and justify the validity of the solution. There are a lot of factors to consider before purchasing an RTK/PPK drone, but for the longer term it seems to be a good investment, especially if you are working in an industry and need very accurately georeferenced results.
If you are ready to get a RTK/PPK drone, do not forget to check if you have access to the local base station or VRS network if you go for the RTK/PPK solution. Otherwise, you would still need to measure your own base stations!
Special thanks
Special thanks to all who donated either equipment or time
| senseFly | the ebee Plus drone |
| EPFL TOPO lab | the Javad Triumph RTK |
| Data Acquisition | Dai Shi, Lisa Chen |