

¿Cuál es el mejor? El viDoc RTK o el P1 y el DJI Matrice 300
Los nuevos avances en fotogrametría y tecnología LiDAR están aportando nuevos flujos de trabajo y funcionalidades para reconstruir la realidad en 3D. Mientras que el auge de los nuevos smartphones con sensores LiDAR es un avance emocionante para la topografía terrestre, el cielo se está abriendo con nuevo hardware especializado, desde drones 4G hasta potentes cámaras. La P1 es una cámara de 45 MP utilizada por algunos fotogrametristas profesionales que realizan levantamientos con drones.
Para los grandes proyectos típicos de topografía, un dron es la mejor opción. Sin embargo, cuando se trata de un solo lugar que necesita un levantamiento topográfico detallado, ¿podría el viDoc competir con un dron aéreo?

NaviGate es una empresa profesional de topografía y SIG con sede en Polonia que suministra drones y software cartográfico para drones. Su trabajo en la distribución de software y hardware especializado en topografía significa que son expertos en la creación y el suministro de modelos 3D precisos que están listos para su uso en la construcción, la topografía, y mucho más. Probaron varias herramientas diferentes para crear su propia referencia sobre la precisión de la tecnología. El equipo de NaviGate se dirigió a un búnker de hormigón construido en la Primera Guerra Mundial que está parcialmente demolido. Querían crear modelos 3D del lugar con múltiples herramientas para comparar los flujos de trabajo y la precisión. Esto incluía comparar la cámara Zenmuse P1 montada en un DJI Matrice 300 RTK con el rover viDoc RTK.
- Detalles del proyecto
- Variaciones de los flujos de trabajo topográficos para modelos 3D
- Volar un dron para crear un modelo 3D
- Escaneado terrestre 3D completo con precisión RTK
- Procesamiento de sobremesa frente a procesamiento en la nube para fotogrametría
- Los resultados de utilizar el P1 en comparación con el rover viDoc RTK
- Elegir entre fotogrametría aérea y terrestre
Detalles del proyecto
| Usuario | NaviGate |
| Ubicación | Polonia |
| Recogida de datos | PIX4Dcatch iPhone 12 Pro Xiaomi 11 Lite |
| Hardware aéreo | DJI Zenmuse P1 |
| Software de procesamiento | PIX4Dmapper PIX4Dcloud |
| Hardware RTK/GNSS | viDoc RTK roverSpectra Focus 35 Spectra Precision SP85 |
Variaciones de flujos de trabajo topográficos para modelos 3D
El objeto de la medición es un antiguo polvorín situado en la colina de Swarog, en la región de Cracovia. La estructura fue construida y dañada en la Primera Guerra Mundial en una zona inclinada con una pendiente que oscila entre el 5 y el 7% en el terreno circundante. Es un edificio de una planta con algunos bloques de yeso y arcilla en su estructura. El equipo de NaviGate se propuso recopilar datos con un DJI Matrice 300 RTK (y P1 montado), así como con el rover viDoc RTK acoplado a un iPhone 12 Pro. Los conjuntos de datos RTK se compararían con un conjunto de datos del XIAOMI 11 Lite para comparar la precisión con un flujo de trabajo sin RTK.

Para estar seguros de la precisión de los resultados, el equipo de NaviGate tuvo que reunir primero un conjunto de datos de base que utilizaría como referencia. Realizaron mediciones en tierra con un receptor GNSS (Spectra Precision SP85). Éste se utilizó para recopilar datos de geolocalización y recibió correcciones del servicio NTRIP utilizado in situ. El equipo también midió las coordenadas de 15 puntos precisos con una estación total Focus 35. Las coordenadas de estos puntos se compararían con los resultados generados por el dron y el conjunto de datos P1 y viDoc para comprobar su precisión.
Volar un dron para crear un modelo 3D
La cámara Zenmuse P1 suele montarse en un DJI Matrice 300 RTK. Este hardware puede utilizarse para levantamientos aéreos en sectores como el de la construcción (por ejemplo, seguimiento del progreso o medición de existencias con drones) o levantamientos terrestres y del terreno. El dron voló un área de 1,5 hectáreas con el modo de captura oblicua inteligente. El dron voló a una altura de 80 metros y recogió imágenes con precisión RTK. Las fotos de los sensores se transfirieron a través de la tarjeta SD a un ordenador. El equipo tuvo suerte y contó con unas condiciones de vuelo óptimas, con una nubosidad moderada y una temperatura suave de 15 grados Celsius (59 grados Fahrenheit). Los resultados finales incluyeron 110 imágenes RGB que se exportaron como archivos .tiff. Estos datos se procesaron con PIX4Dcloud, el software de fotogrametría en línea.
Escaneado terrestre 3D completo con precisión RTK
El rover viDoc RTK es un dispositivo portátil que se acopla a determinados dispositivos iOS y Android. Durante la recogida de datos con la aplicación gratuita de escaneado terrestre PIX4Dcatch, el viDoc etiqueta las imágenes con datos RTK a través de redes NTRIP locales. Como resultado, los datos recopilados con viDoc y PIX4Dcatch incluyen fotos muy detalladas etiquetadas con datos RTK para garantizar una precisión centimétrica. Con determinados dispositivos iOS, este flujo de trabajo también incluye datos LiDAR que pueden procesarse con el software Pix4D (PIX4Dmatic incluso ofrece la opción de fusionar datos LiDAR de iOS y fotogrametría en la misma nube de puntos).

Para este ejemplo, NaviGate utilizó un iPhone 12 Pro, que tiene un sensor LiDAR integrado. Un topógrafo que sostenía el viDoc caminó alrededor del sitio en el sentido de las agujas del reloj, a un promedio de 2 kilómetros por hora. Escanearon el exterior de la estructura antes de escanear también el techo en cuatro líneas que se desplazaban de este a oeste. PIX4Dcatch incorpora información en tiempo real que crea un modelo 3D a medida que el usuario camina por el lugar y le muestra cómo se va completando su modelo 3D, lo que garantiza que no habrá lagunas en el conjunto de datos final. La distancia media entre el dispositivo móvil y el objeto era de 3,5 metros. Recogieron un total de 654 fotos geoetiquetadas. Gracias a la integración nativa con el flujo de trabajo de Pix4D, las fotos se cargaron automáticamente en PIX4Dcloud, donde comenzó el procesamiento. El equipo de NaviGate recibió una notificación por correo electrónico con un enlace al proyecto en PIX4Dcloud cuando finalizó el procesamiento.
Para comparar los resultados, también se utilizó el XIAOMI 11 para completar una exploración terrestre del mismo estilo. Los datos se recopilaron con PIX4Dcatch, pero el dispositivo no estaba conectado a un viDoc, lo que significa que no se estaban recopilando también datos RTK.
Procesamiento de sobremesa frente a procesamiento en la nube para fotogrametría
Existen varias opciones para procesar los conjuntos de datos de fotogrametría capturados con drones o dispositivos móviles. Pueden realizarse automáticamente a través de un producto en la nube como PIX4Dcloud. La aplicación en la nube se ejecuta en los servidores de los proveedores de Pix4D y, por tanto, no requiere un potente hardware de procesamiento por parte del usuario.
Sin embargo, si un usuario desea tener más control sobre los ajustes durante el procesamiento o necesita mantener una cadena de custodia segura sobre los datos, como es el caso de los agentes de seguridad pública que recrean escenas de crímenes o accidentes, entonces un software de mapeo de escritorio es una mejor opción.
En este proyecto, NaviGate utilizó un portátil Dell Vostro P71F para procesar los datos capturados con la cámara P1. Procesaron sus datos viDoc con PIX4Dcloud y PIX4Dmapper, mientras que los datos del dron se procesaron en PIX4Dmapper.
Los resultados de usar la P1 en comparación con el viDoc RTK rover
Una vez finalizado el procesamiento, el equipo de NaviGate comenzó a comparar los resultados, incluido el nivel de detalle.
Para la distancia de muestreo del terreno (la GSD, que es la distancia que representa en realidad el espacio entre dos píxeles), el conjunto de datos P1 arrojó un resultado de 0,91 cm. La precisión se obtuvo utilizando puntos de control establecidos con la estación total (mediciones realizadas con el Focus 35). Los modelos 3D realizados con el viDoc + iPhone y el XIAOMI tenían una GSD de 0,2 cm. Esto tiene sentido ya que los dispositivos móviles estaban mucho más cerca de los objetos objetivo, y un valor GSD más pequeño significa que hay más detalle. La GSD del P1 es notablemente precisa para un dron que vuela a 80 m de altitud, pero sigue siendo inferior a la de los escáneres terrestres en este ejemplo.
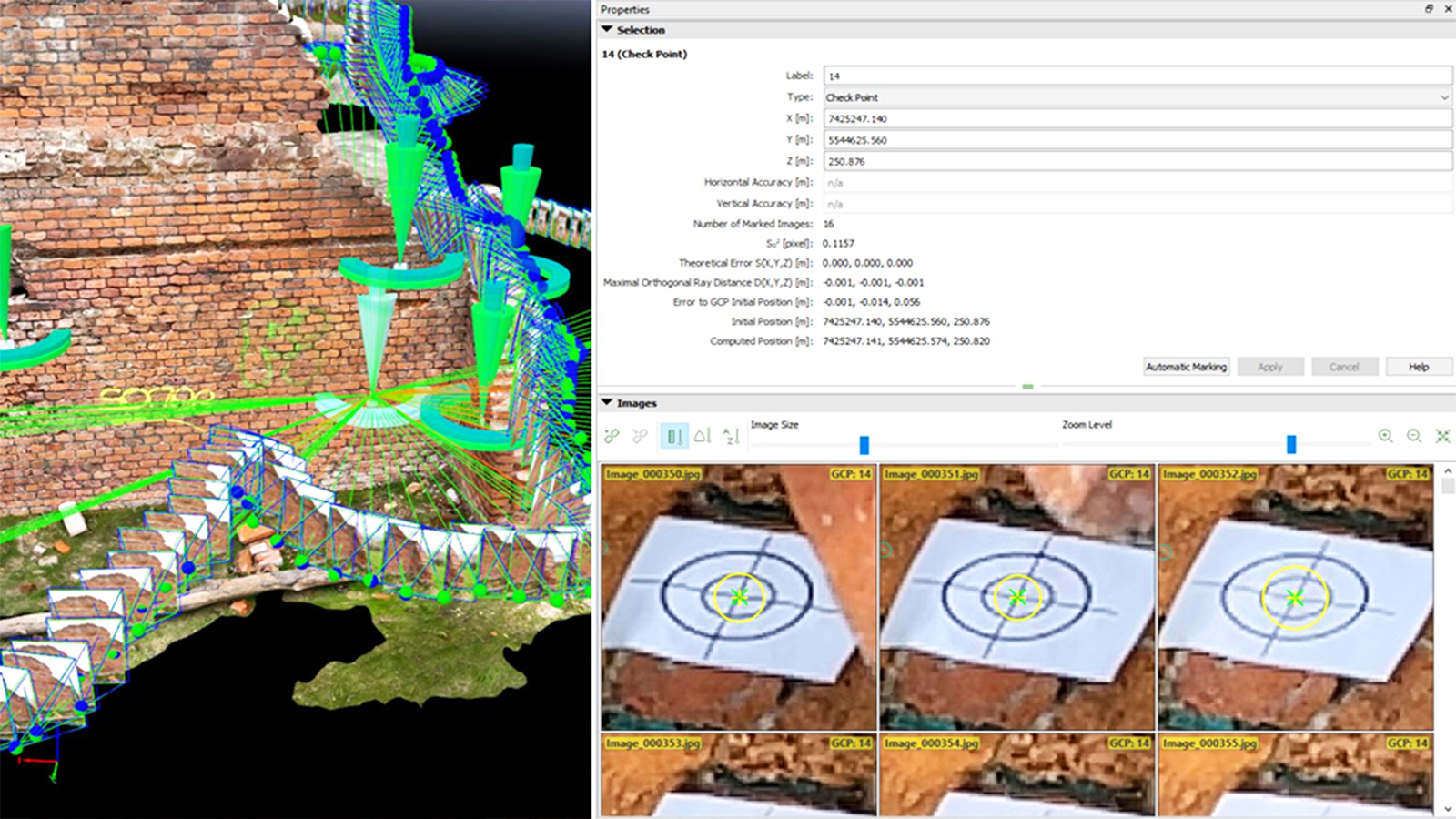
El equipo NaviGate había fijado 15 objetivos de cada conjunto de datos para compararlos con los datos GNSS recogidos con la estación total. Se compararon los 15 objetivos y se observaron pequeñas diferencias entre las coordenadas medidas con la estación total Focus 35 y los flujos de trabajo con drones/móviles.
El error cuadrático RMSE para las mediciones con drones y viDoc fue de más/menos 2 cm en los ejes X,Y y Z. Esto significa que las mediciones realizadas a partir de estos conjuntos de datos cumplen la norma del Grupo 1 exigida por la legislación polaca. Como referencia, el Bureau Veritas ha certificado el rover viDoc RTK para mediciones de Clase A (con una precisión de 5 cenitmetros).
El Xiaomi, sin RTK, tenía una precisión de 5 cent�ímetros al medir objetos situados a 2 metros de distancia. Esta imprecisión podría eliminarse o mitigarse con el uso de GCP o puntos de control específicos. Estos resultados pusieron de relieve la sencillez del flujo de trabajo del viDoc, ya que era más preciso y no requería ningún paso adicional para garantizar esa precisión, a diferencia de los puntos de control que necesitaría el Xiamoi.
Elegir entre fotogrametría aérea y terrestre
El equipo de NaviGate vio que disponía de altos niveles de detalle para ambas formas de fotogrametría. Las imágenes aéreas y los datos de la cámara P1 y el dron produjeron una GSD precisa a pesar de la elevada altitud de vuelo. Sin embargo, al tratarse de un levantamiento de un edificio individual de una sola planta, el flujo de trabajo viDoc RTK sería probablemente una mejor opción para proyectos similares. Para levantamientos a mayor escala, la cartografía aérea con un dron sería una opción menos laboriosa.

Las ventajas únicas del viDoc provienen de su utilidad y versatilidad. Es una herramienta muy adaptable, ligera y portátil, lo que facilita su transporte y uso.
"En comparación con los métodos tradicionales de topografía, aprovechar un dispositivo tan versátil ofrece grandes oportunidades", explica Grzegorz Durlo, de NaviGate.
"El valor del equipo será apreciado por investigadores y arqueólogos durante las excavaciones y la reconstrucción de partes de objetos caracterizados por su gran importancia para la historia y la cultura".
Recientemente, los clientes de NaviGate han utilizado LiDAR en dispositivos móviles para trabajos que incluyen mediciones de volúmenes para silvicultura o medición de volúmenes. Con la precisión del viDoc, estas mediciones de volumen pueden utilizarse para obras de construcción o trabajos de topografía terrestre.


