Point cloud comparison: photogrammetry vs LiDAR
In recent years, mobile phones utilizing LiDAR technology have attracted increasing attention as an easy way to generate 3D point clouds. Mobile apps such as PIX4Dcatch have gone one step further and integrated this technology with photogrammetry. The ability to combine both images and LiDAR for calibration means PIX4Dcatch can achieve more accurate results, with the ability to reproduce smooth or textureless surfaces – and even white walls.
The purpose of this demonstration, however, was to investigate the effects of scanning-with-LiDAR versus scanning-with-photogrammetry, so we used photogrammetry-only with PIX4Dcatch and then LiDAR-only with a comparison phone app. The point cloud results were processed separately in PIX4Dmatic and revealed the difference LiDAR and photogrammetry can make to your output.
The results of photogrammetry vs LiDAR
Reproducibility of the density and edges of the point cloud
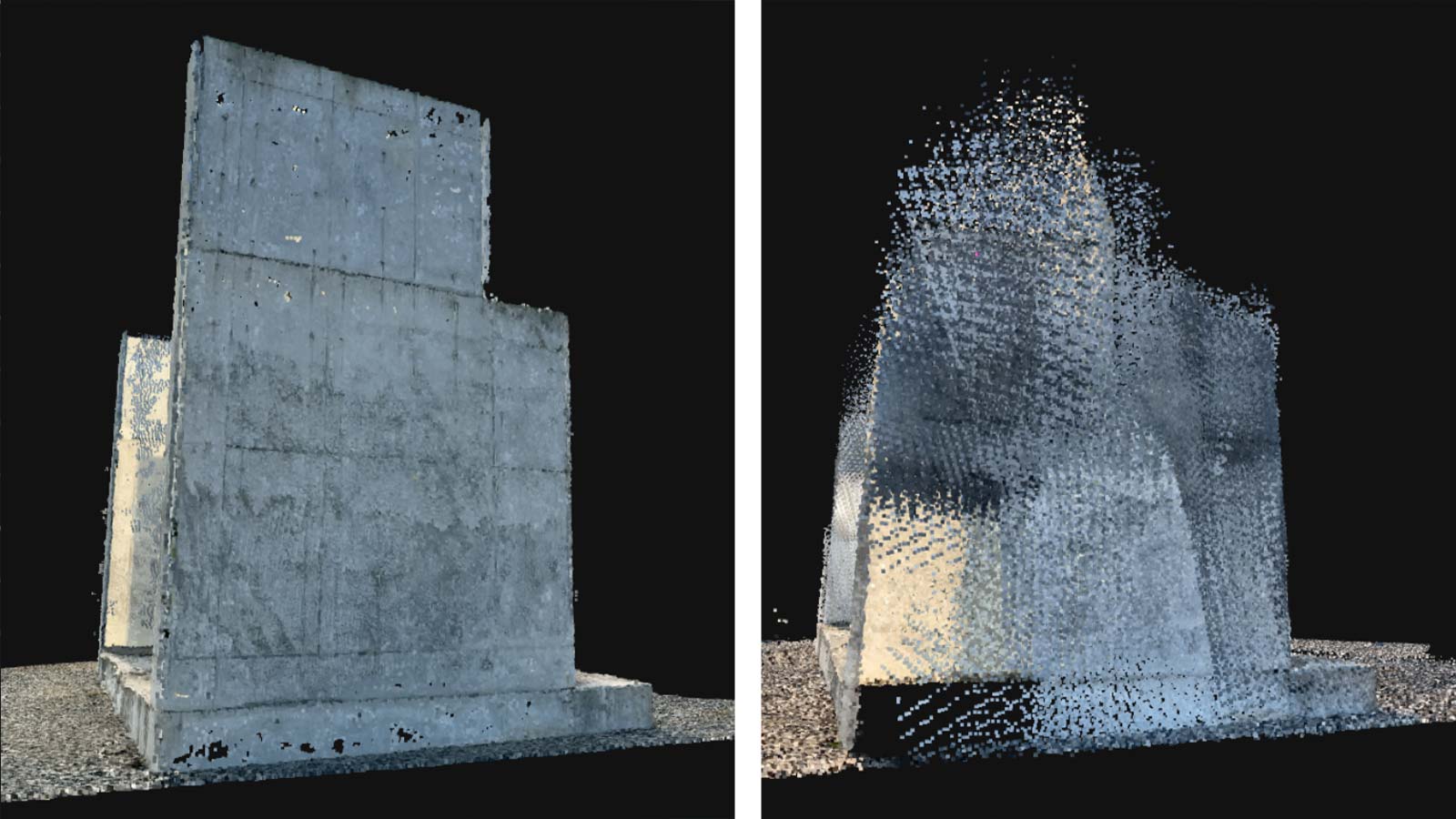
Below are 3D point clouds generated by scanning a concrete block. On the left is the photogrammetry point cloud scanned with PIX4Dcatch, and on the right is the LiDAR-generated point cloud. As you can see, the PIX4Dcatch-generated point cloud has a higher density, and you can see the 5cm x 5cm GCP placed at the edge.

The difference in point density between scanning with mobile phones equipped with just LiDAR compared to mobile phones that use photogrammetry is especially noticeable for structures with complex surfaces. Photogrammetry technology, which generates three-dimensional point clouds from images on a pixel basis, can reproduce even minute shapes.
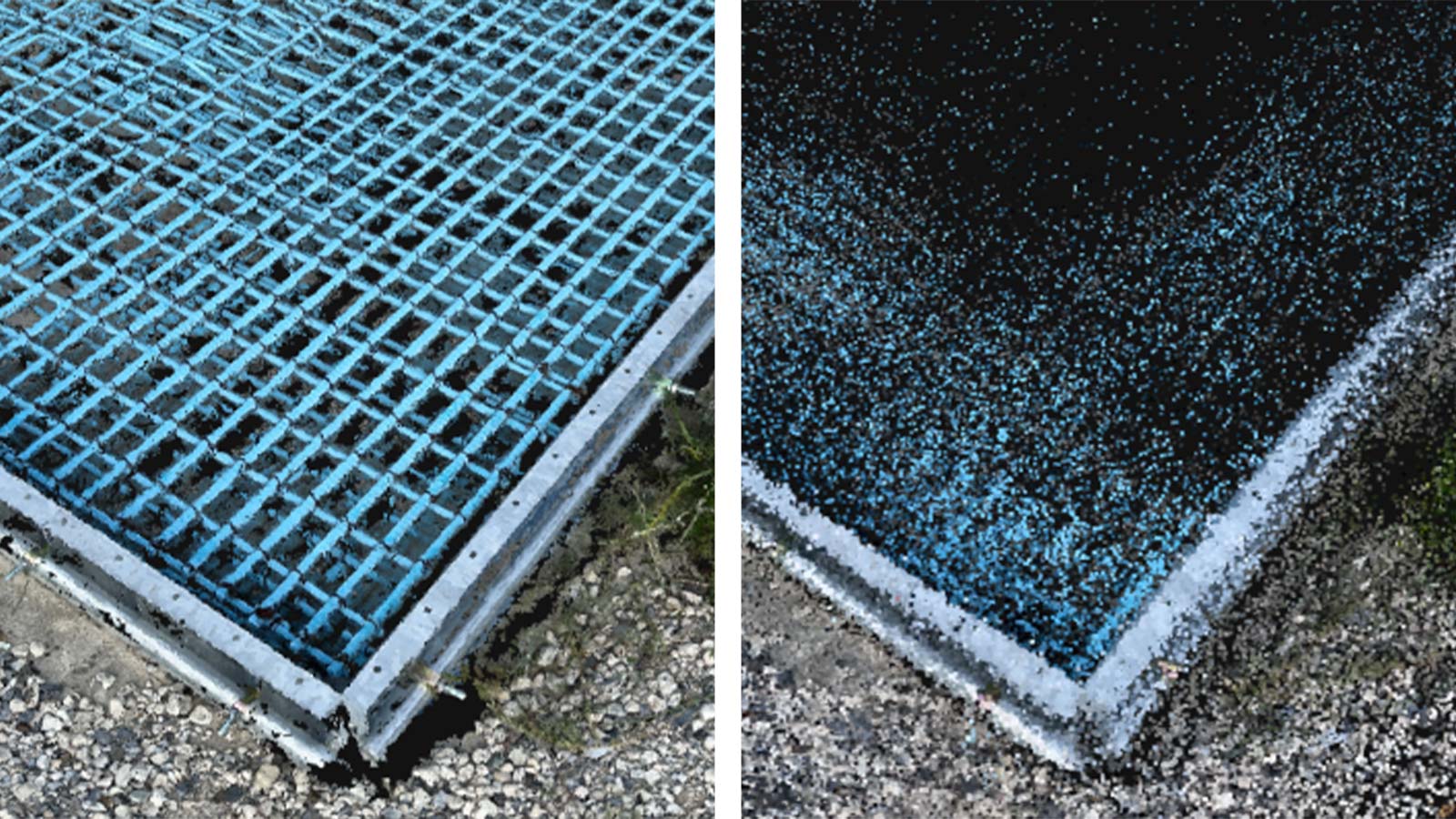
LiDAR on mobile phones has a lower density than LiDAR scanners for surveying, so the point cloud tends to be less dense. In addition, it is not good at reproducing edges because it is not possible to create a point cloud unless the LiDAR irradiates it with pinpoint accuracy.
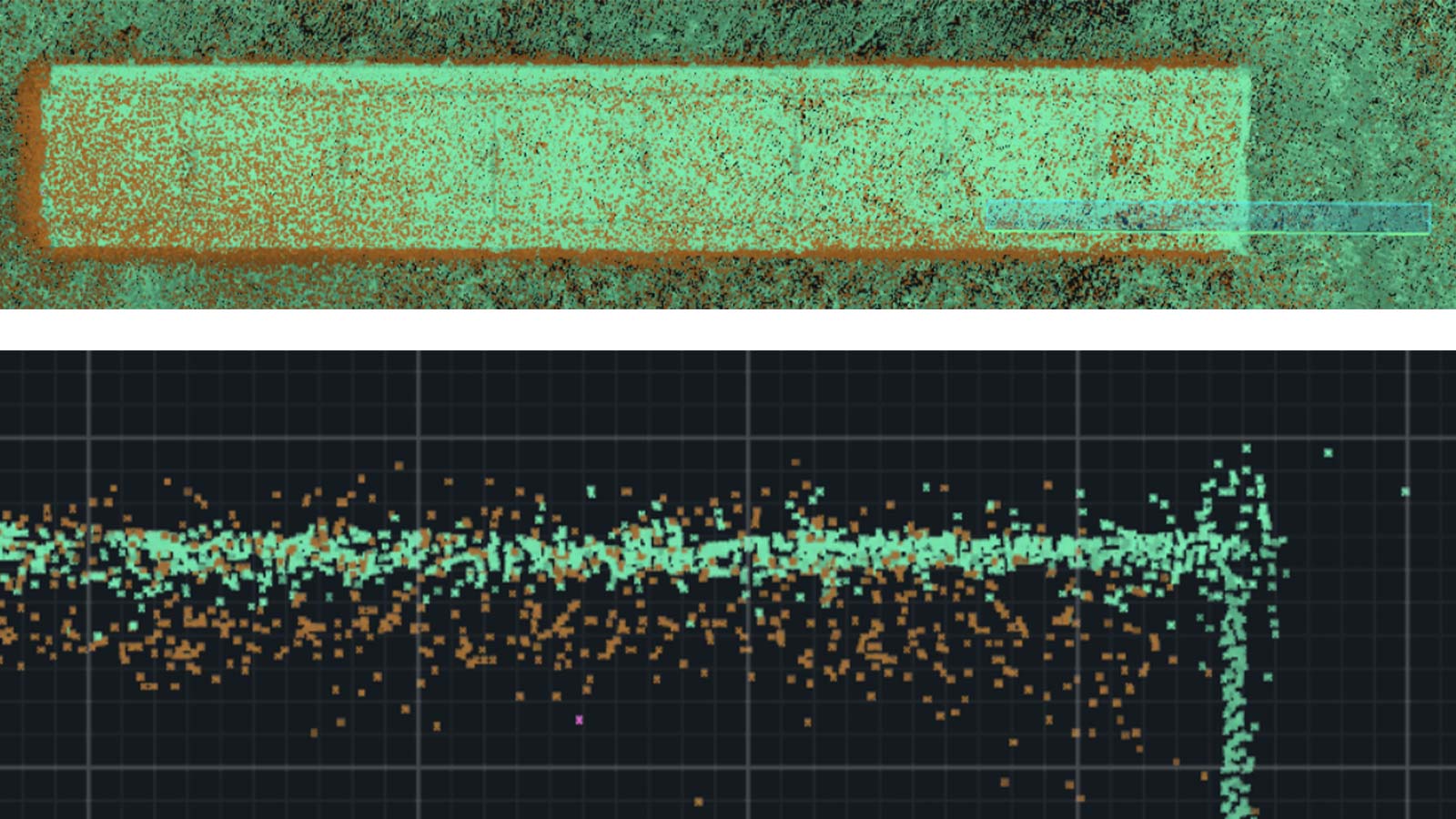
Below is a cross-section of a block. The LiDAR point cloud is orange, and the photogrammetry point cloud is green. As can be seen from the images, the former is sparsely scattered, while the latter is beautifully reproduced down to the edges.
Accuracy comparison
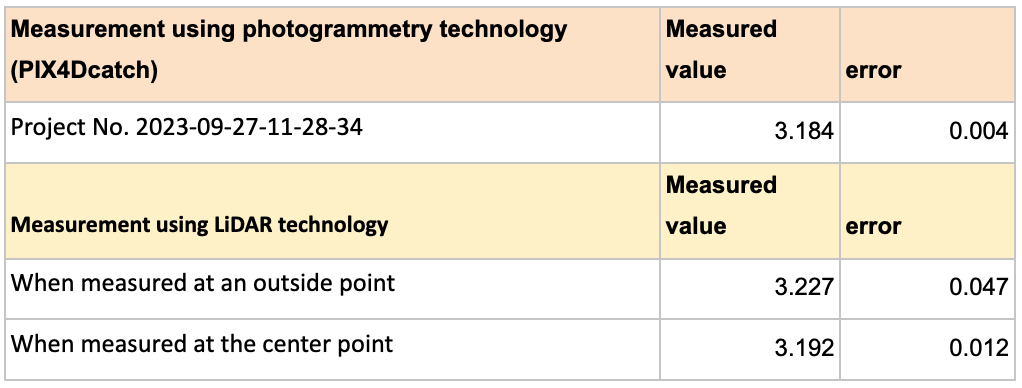
We measured the actual width of a structure and compared it with the three-dimensional point cloud, the value was 3.180m.

The point cloud obtained with PIX4Dcatch’s photogrammetry resulted in an error of 0.004m. Comparatively, the point cloud generated from LiDAR was scattered over a wide area, so the results varied on a centimeter level, depending on which point was measured. The result was an error of 0.047m when using the outer point as the reference, and an error of 0.012m when using the center point as the reference.
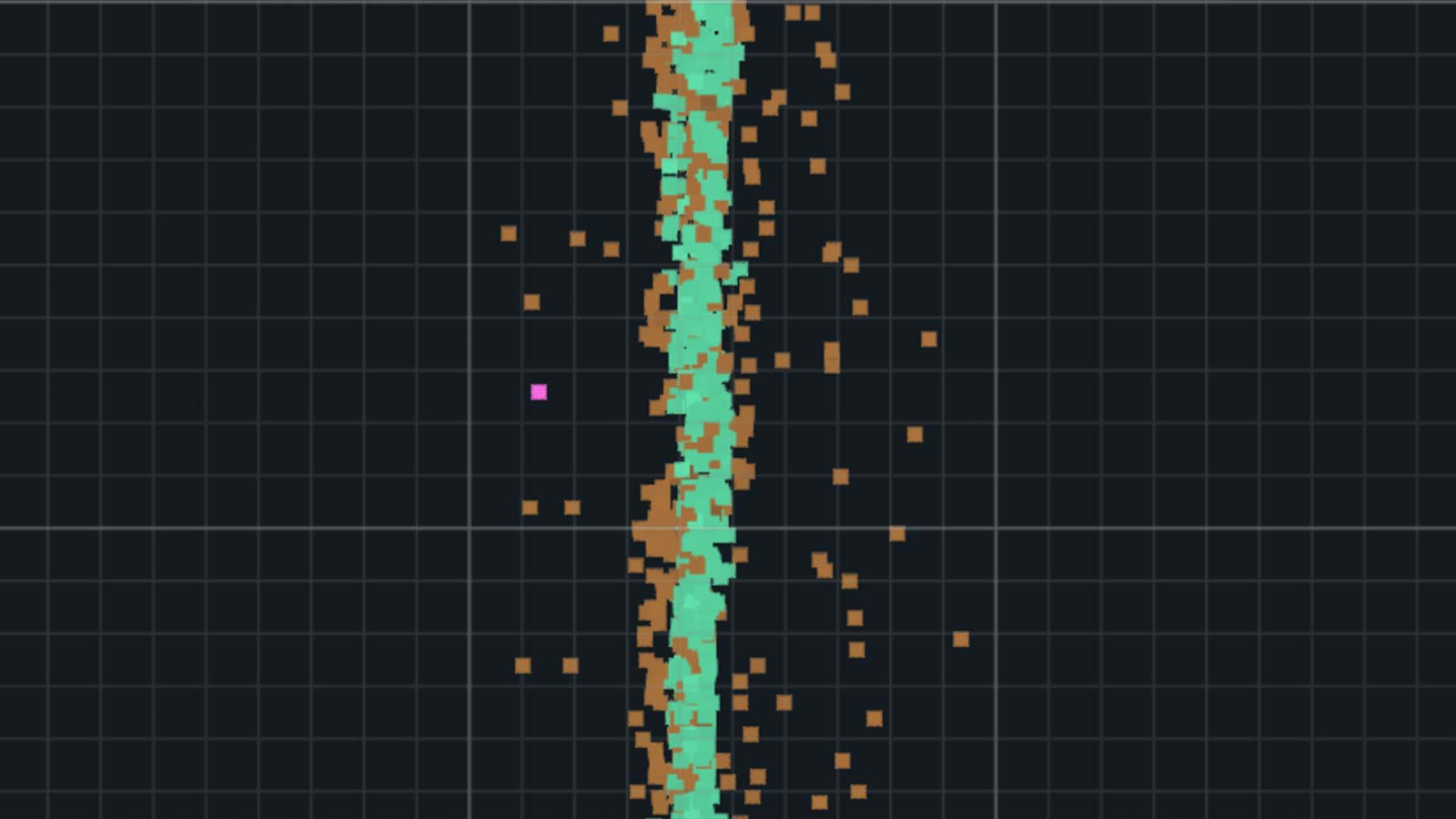
In the image above, 1 grid equates to 1 cm, so the LiDAR point cloud could potentially alter measurement results by up to 7-8 cm depending on which points are measured.
Scanning with LiDAR vs photogrammetry
The effective irradiation distance of the iPhone and iPad's built-in LiDAR is said to be 5 meters. Therefore, when scanning a wide area, it is necessary to scan by moving the mobile device significantly up, down, left, and right. Also, if it is a tall building, parts of the building that are over 5 meters in height cannot be scanned.
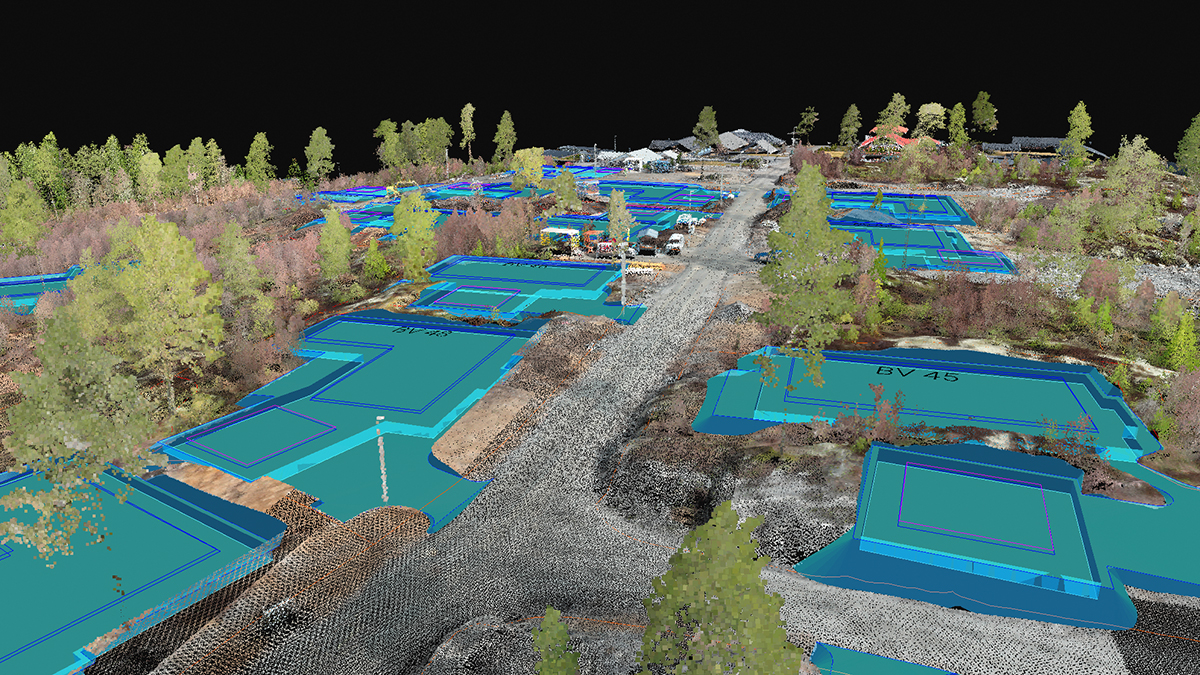
On the other hand, photogrammetry, which uses images as input, can reproduce objects that are far away as long as they are visible in the image. The image below is a reproduction of the 6.6 metre structure. The photogrammetry point cloud scan was completed after just one rotation with the PIX4Dcatch.
PIX4Dcatch combines the benefits of photogrammetry and LiDAR
Through this demonstration, we were able to confirm the advantages of photogrammetry, such as point density, edge reproducibility, and wide-range point cloud acquisition, with actual output. However, mobile phone LiDAR technology does also have an advantage: it does not require any processing, so it has the added convenience of being able to see results immediately.
While PIX4Dcatch is based on photogrammetry, it complements this with LiDAR*, which is used as a preview function to check scan results on the spot. In addition, point clouds acquired by LiDAR can be used to reproduce smooth surfaces (such as cars) which are difficult to use with photogrammetry. In essence, the integration of both photogrammetry and LiDAR within PIX4Dcatch increases its functionality, making it an invaluable tool for professional scanning projects.
- When using a device equipped with LiDAR.