Capture
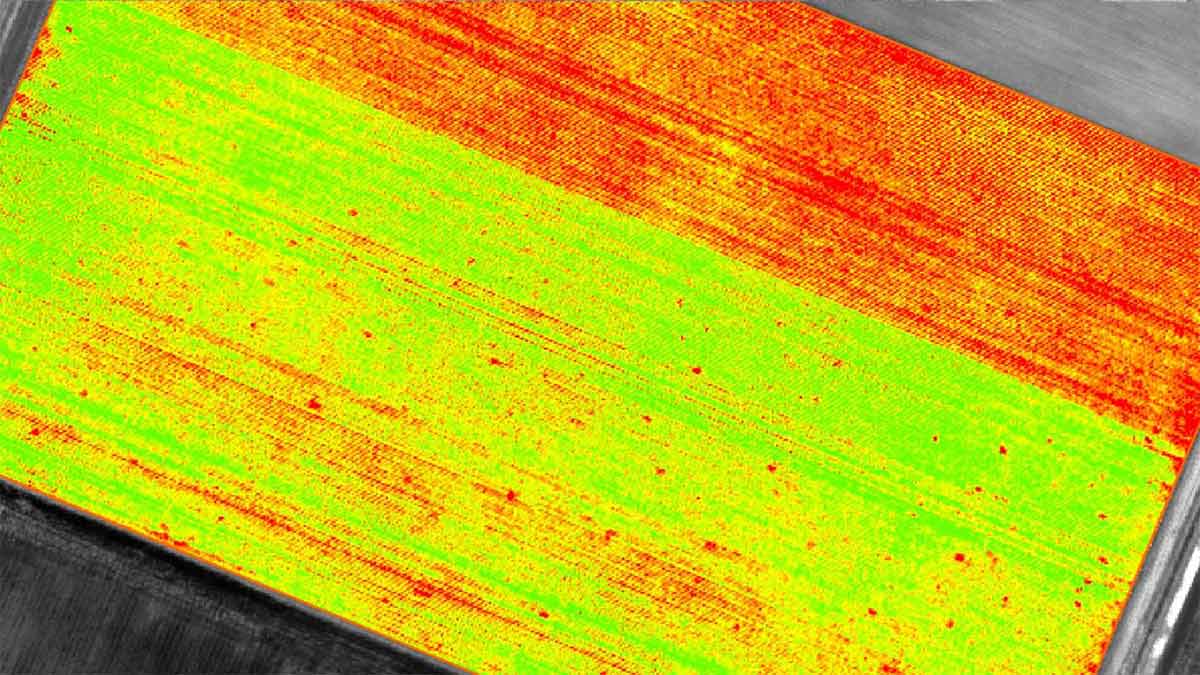
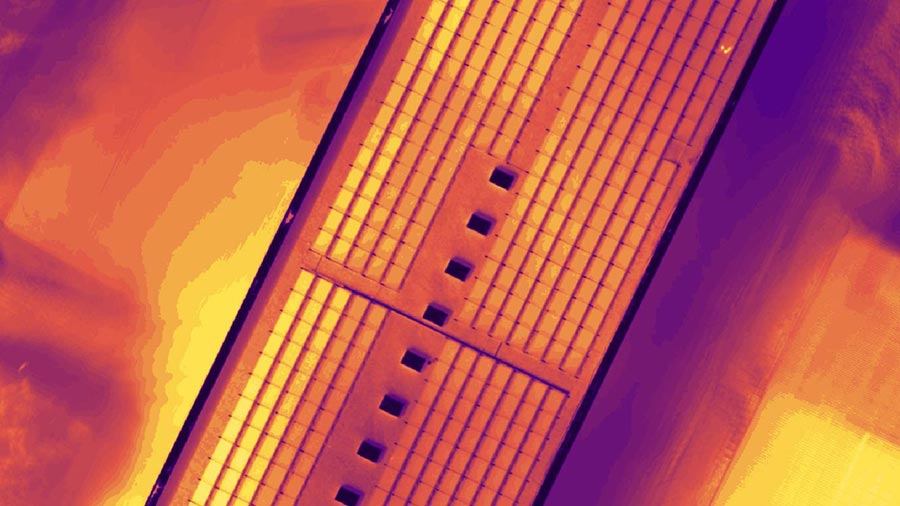
Capture RGB, thermal, or multispectral images with any camera or drone and import them to PIX4Dmapper.



















PIX4Dmatic, the next-generation photogrammetry software, is designed to work with the latest generation of drones and transform your large number of images into accurate point clouds, DSMs and orthomosaics over 40% faster than ever before.






We discuss what are the ground control points (GCPs), how many are needed for an accurate aerial map, how they affect accuracy and why they look the way they do.

Wells for Zoe is using PIX4Dmapper to map reforestation projects in Malawi as they replant trees and support the local community with freshwater wells. Find out how!
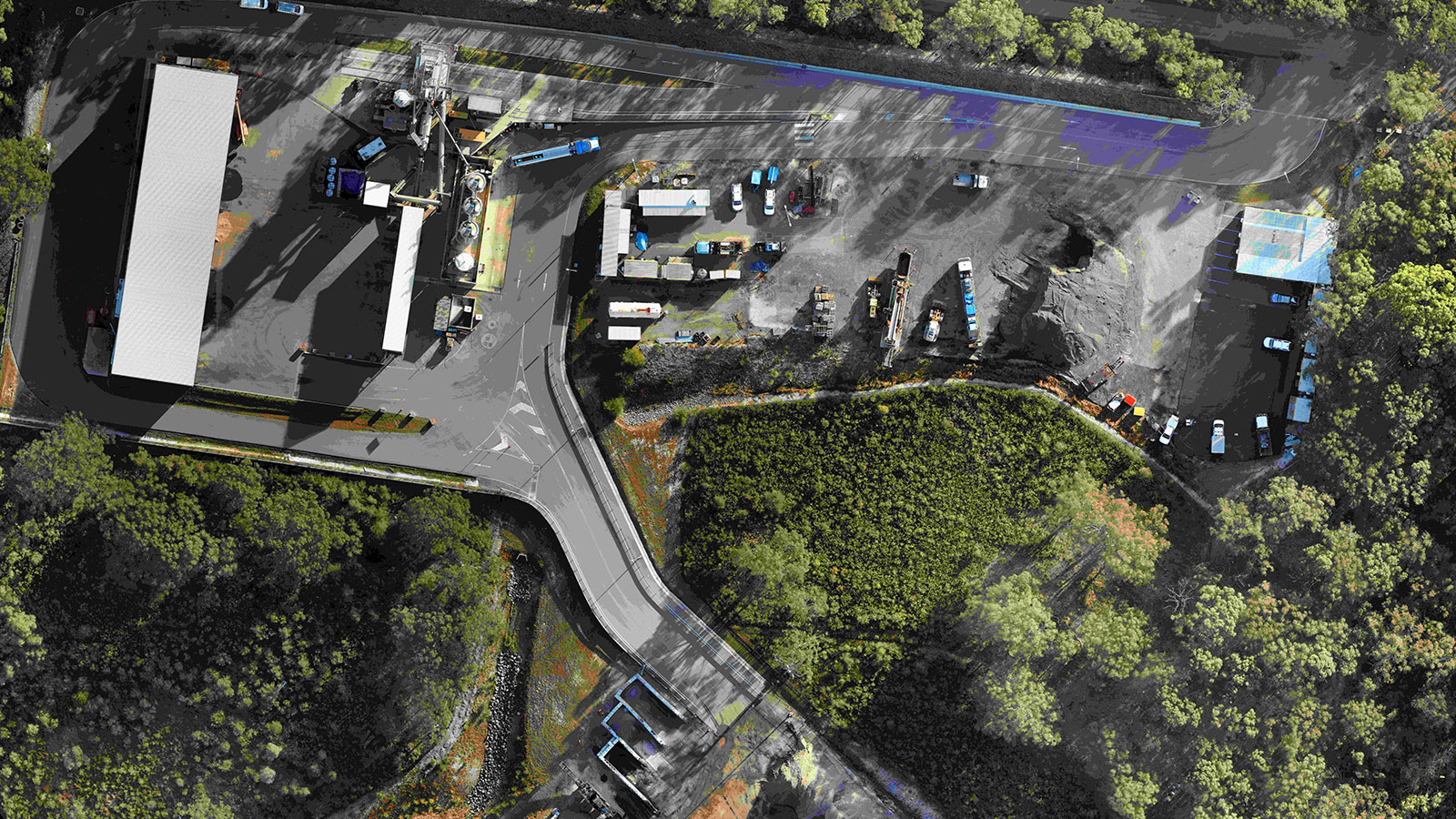
Learn how PIX4Dmapper helps construction companies improve their operational workflows - whether that’s measuring stockpile deposits and withdrawals, or modeling a site itself.







